I am posting this on the discussion forum as a last resort to find a solution for the problem I’m facing with RPlidar A2M12 360 degree laser scanner by slamtec.
I used this sensor for obstacle avoidance with cube orange plus. During a free fall crash (not because of this sensor), The sensor was dislodged from the mount and connecting cable came off from the connector.
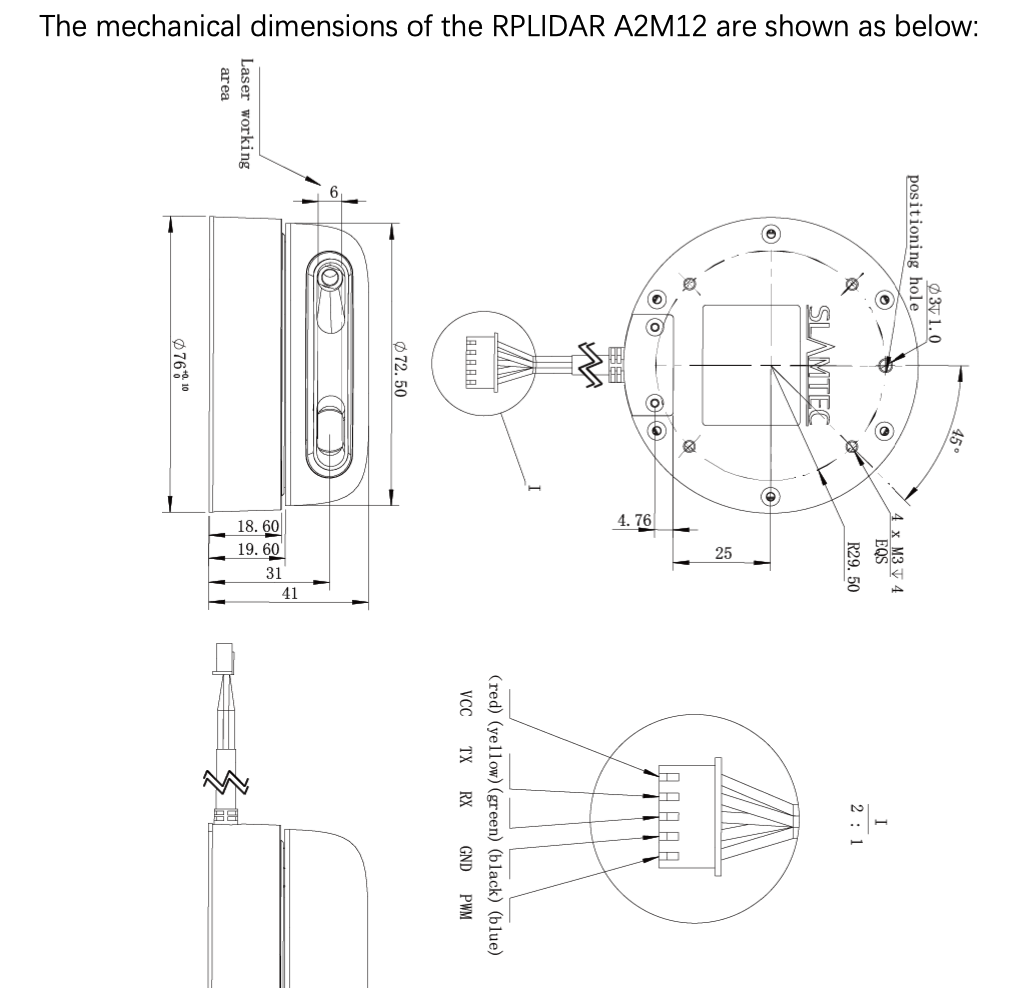
The outer side of connecting cable has 5 pins but the inner(lidar) side of the connector has 6 pins with an extra white wire coming from inside of connecting cable. I have searched product documents, manuals and tried internet sources as well but I couldn’t find either the pin configuration or the colour code of the connector. Neither is it inscribed on the PCB inside.
I am requesting if anyone from the community owns this model and could share an image or provide any information regarding this, it would be of great help
I have contacted my vendor (robokits.co.in), slamtec as well for this information and received following replies after a few days of requests and providing images.
Vendor’s reply: “We are reselling this product. And we cannot open the product also so either you have search on internet for the inside images of this product or you can purchase a new product and open it to look inside and then you will have two lidars to use.”
Slamtec’s reply: “You need to find the vendor to solve the after-sales problem for you. We can’t provide you after-sales service. Because you didn’t buy this product directly from our official. We only serve customers who buy products from us. If you still insist, ‘Support@slamtec.com’ Good luck, This is our after-sales email support. Maybe they will help you. But I can’t promise you that they will, You can try.”
Images for reference:
Despite the developers stating there is no support for A2M12 model yet on Ardupilot, I was able to use this device for omni directional planar obstacle avoidance by connecting it to serial port and providing a dedicated 5v power supply and shorting the motor and vcc cables.
Thanks for your reply. As mentioned above and can be seen from images, I need the pin configuration for 6 pin connector of the cable that goes into the lidar. Not the 5 pin connector that can be connected to external devices.
I have finally got my lidar working again. I have figured out the configuration of this 6 pin connector with help of a university student working on drones with this lidar and didn’t mind to open his lidar to show me the configuration.
To anyone (Who have purchased this from India) looking for internal information of this specific product, the only options available are to contact the vendors of slamtec to convince them to offer this information (Expect upto 1-2 months wait time) or Buy another lidar and check it for yourself (Not an economic option).
Here’s the information I gathered:
6pin connector type: JST - ZH 1.5mm 6pin Connector Female (ZH and ZHR are different)
Pin configuration (Left to right when you place the lidar upside down) :
Vcc(Red) - TX(Yellow) - RX(Green) - GND(Black) - PWM(Blue) - Grounding neutral(White)
hi, @RGSTC
I purchased an RPLidar A2M12 and attempted to connect it to a Pixhawk 6c, but I’m having trouble getting it to function properly. I’ve supplied it with a dedicated 5V power source, connected the lidar’s RX to Telem 1’s TX, the lidar’s TX to Telem 1’s RX, and the lidar’s GND to Telem 1’s GND. Currently, the lidar can rotate, but there’s no data showing in the lidar window of Mission Planner.
do the extra white wire need to be connected? How should they be connected?
Looking forward to your reply. Thank you.
Hi @MarKC ,
Sorry for the late reply.
In serial connection, a minimum of three lines are used for communication: transmit (TX), receive (RX), and ground (GND). For any signal carrying circuit to be complete between two devices, we need to have a common ground. In this case the Sensor and the Autopilot.
The additional power supply we are providing is to support the power requirement for the brushless motor in the RPlidar.
You can try this with a simple test with any sensor as well
Take any uart sensor and connect only rx and tx to the TTL converter while providing the power seperately once by connecting the common ground to the TTL converter and once without the common ground.
Ideally, in the case where there is no common ground. you will not be getting any data from the sensor