-
All systems in the diagram are on the same network, over a Tailscale VPN. Each system (laptop/Raspi) is able to ping all other systems.
-
Both GCS can see both aircraft, we’re running more tests to see if we’re able to observe something.
-
Yes, cellular is over the Tailscale VPN.
-
UDP ports are added in the rpanion web UI - for each GCS that needs to be connected.
-
The purpose of enabling the TCP server is to be able to connect to the aircraft where there’s no cellular. We’re using the checkbox in the rpanion web UI to enable the TCP server.

One more thing I need to add is that this cmd synchronization problem occurred only with the toggle safety switch. We did not see this cmd synchronization problem with Flight mode change, Motors test, Mission Upload, Vehicle Arm-Disarmed, etc.
Do you mean the hardware safety switch on the vehicle or a button on Mission Planner? I couldn’t find a safety switch button in Mission Planner.
I note you’re using TELEM2 for the connection to the Ras Pi. Do you have any other telemetry radios connected to the aircraft?
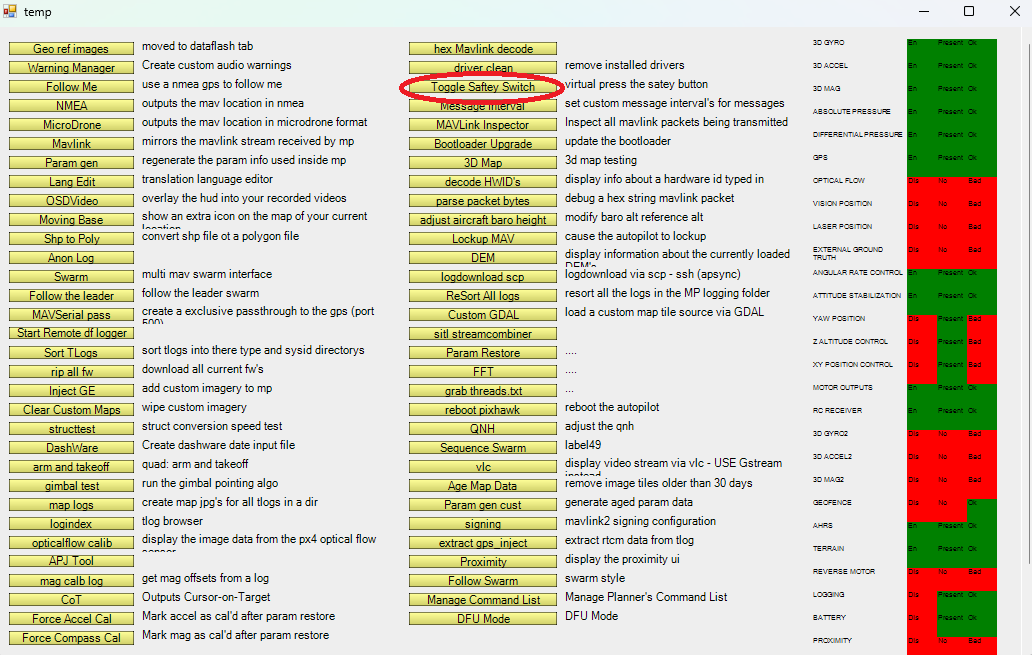
There is a Soft. button on Mission Planner, MP > Ctrl+F > You will find the “Toggle Saftey Switch” opt.
Currently, we’re not using the Physical safety switch on the aircraft.
Yeah, we’re currently using the RFD 868 radio telemetry.
I’ve tested that button. I can confirm that there is a bug there that Mission Planner will send the incorrect target_sysid in the message, leading to the incorrect vehicles(s) getting the message. I’ll do up a fix in the next few days.
How are these connected? ArduPilot does bridge telemetry ports - any MAVLink messages coming in one one TELEM port can be sent out on other TELEM ports.
So while we were checking the UDP and TCP protocols, we were not using the RFD at that time.
From your connection diagram, is there a typo? You’ve got GCS01 connecting to 10.42.0.1:5760, which corresponds to Aircraft 02, not aircraft 01.
Other than that, I’ve been unable to replicate your connection issue. Mission Planner is definitely seeing two aircraft on the 1 connection, which implies that the aircraft are feeding telemetry to each other, either at the Pixhawk or Raspberry Pi.
Sorry Stephen, The diagram needs to be corrected. We made a change in Aircraft 01’s Starting IP, 100.43.0.1, and we’ve connected the GCS 01 to Aircraft 01’s hotspot via TCP 100.43.0.1:5760.
Currently, we are using Mission Planner v1.3.80.
Mission Planner has now been patched with this fix. See Temp: Add sysid target to safety switch command by stephendade · Pull Request #3176 · ArduPilot/MissionPlanner · GitHub
2 Likes
Hey @stephendade, thanks so much for this patch!
I’m seeing Mission Planner v1.3.81 is getting released. Since this PR is merged, this fix would be working on 1.3.81?
Correct, it’ll be in that release.