Version 0.8.0 of Rpanion-server has been released!
Rpanion-Server is an Open-Source software package for a managing the companion computer (such as the Raspberry Pi and NVIDIA Jetson) connected to an ArduPilot-based flight controller.
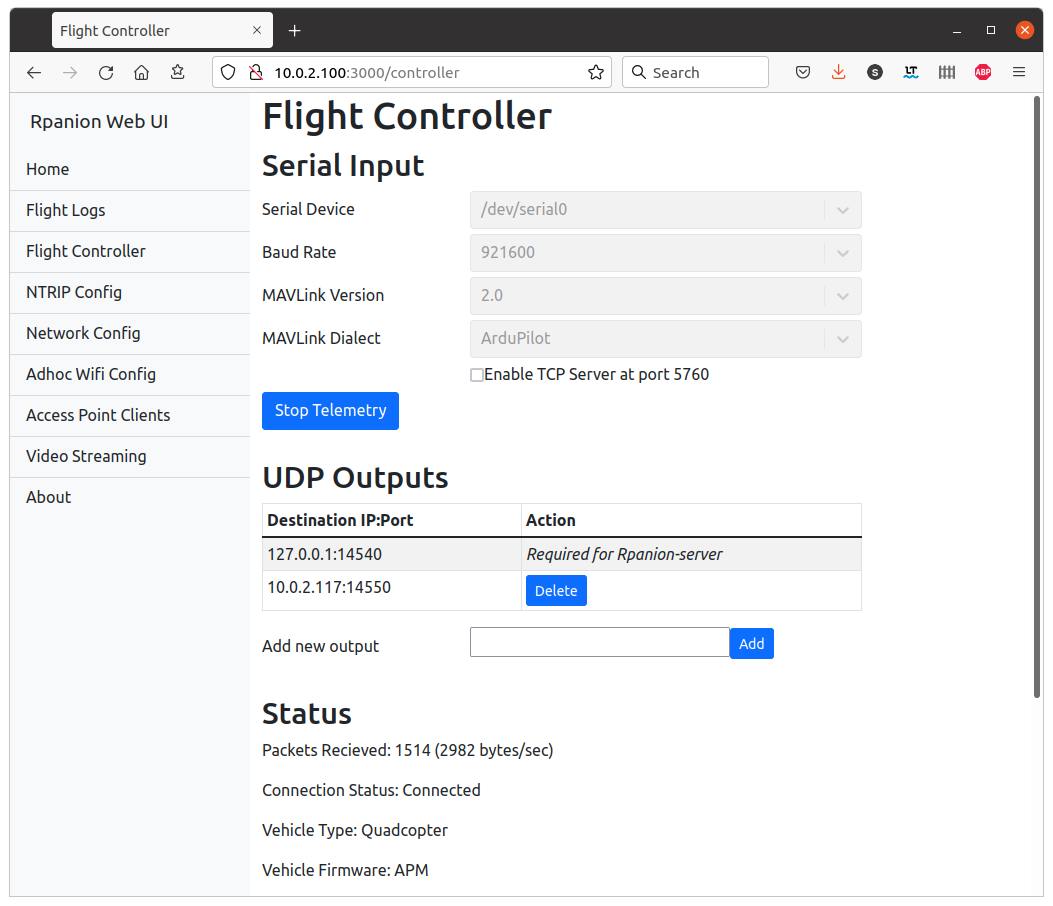
Rpanion-Server consists of a node.js webserver for the user interface and mavlink-router for routing MAVLink telemetry from the connected flight controller. GStreamer handles low latency video streaming from any connected cameras. There are also modules for managing network connections, NTRIP streaming and viewing hardware information.
Version 0.8.0 adds the following major new features:
Add UDP video streaming
Support for Ubuntu on the Raspberry Pi and NVIDIA Jetson
Add fps option for video streaming
Ad-hoc wifi support
Wifi channel selection in AP mode
TCP server for MAVLink telemetry
NTRIP streaming support
UI more consistent
The documentation and pre-built disk images for the Raspberry Pi are available here.
Selecting “auto” as channel selection for a new AP wifi leads to an error message:
Error editing network: Error: failed to modify 802-11-wireless.channel: ‘0’ is not a valid channel.
This error also occurs when I switch between 2.4 and 5GHz. Selecting “auto” tries to use the previous selected channel from the other frequency spektrum.
I.e. channel 6 for 5GHz, channel 140 for 2.4GHz.
Adding a new network on an adapter with no previous existing configuration, the “attach to specific adapter” dropdown only shows “none” and “eth0” (I am connected through eth0 at this point). Only after the new network config is saved, the dropdown gets populated with “wlan0” “wlan1”, etc.
Sometimes (I could not establish a way to reproduce this), the starting IP for a new network gets changed to 10.42.0.1 after saving for no apparent reason. Just now it changed back to the IP I entered (10.0.3.100) after reboot.
Trying to change a client network, it saves the new passphrase, but not the new SSID.
To point 5, on my other rover changing an existing AP network works without a problem. I cloned the sd-card from this rover to the other one and the wifi relay to save the time installing the RTL8812AU drivers again. Could this have messed something up?
It took me a while, but I entered the swarm tests.
I took one of the quads and replaced it with Rpanion-server to test the ad-hoc network as we used it. My findings:
Connected to the standard ad-hoc network of other drones without nmcli;
After booting, the configuration was not maintained. It is necessary to redo it;
I was unable to select a listed interface other than wlan0. I usually use a USB dongle to have usable ranges in the field;
Manually, I used the function that makes the configuration[1] with the wlan1, and it worked well, however, the configuration was also lost in the reboot.