I was wondering if anyone has ever setup a rover/boat to operate with a tethered controller instead of/in addition to the standard RC controller? I am kicking around the idea for a shallow water dredge and it would be useful to have a waterproof tethered controller for backup if needed.
It would be a rare solution and I’m not even sure how you would go about getting the inputs into the flight controller, maybe setting i/o pins to analog inputs and have the hand controller use pots as voltage dividers across the 3.3v?
Does it even need to be autonomous? Maybe you could forget about the fc and just use wired controller operating relays or something
Looking into this a bit further it seems that it might be possible to send MAVLink messages in guided mode in order to make the rover move. That would require a companion computer but it might be the most straightforward approach
what about just attaching a receiver on the end of the wire? you could also wire direct to the module bay (with a voltage divider) or the trainer port.
most radios put out ppm from the trainer port. so you dont need a receiver.
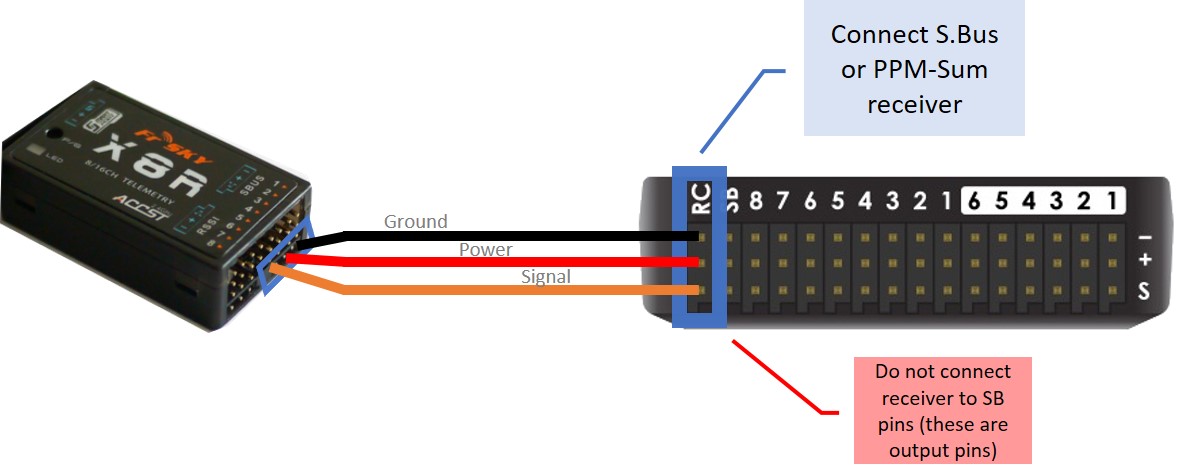
if your radio cant do that just get a receiver compatible with your radio and attach a long wire between it and the rc input of the flight controller. so its essentially still RC but with the receiver on shore.