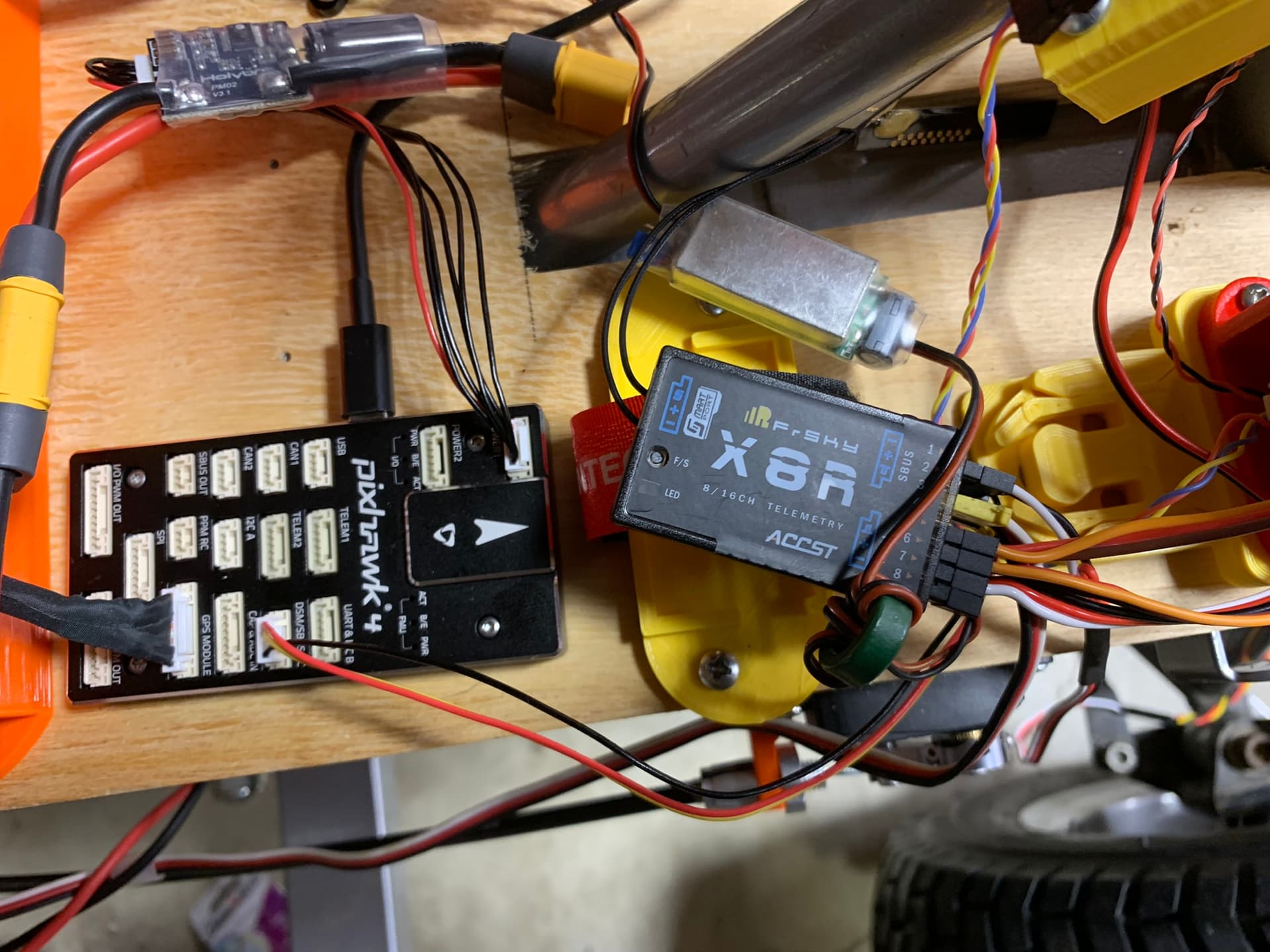
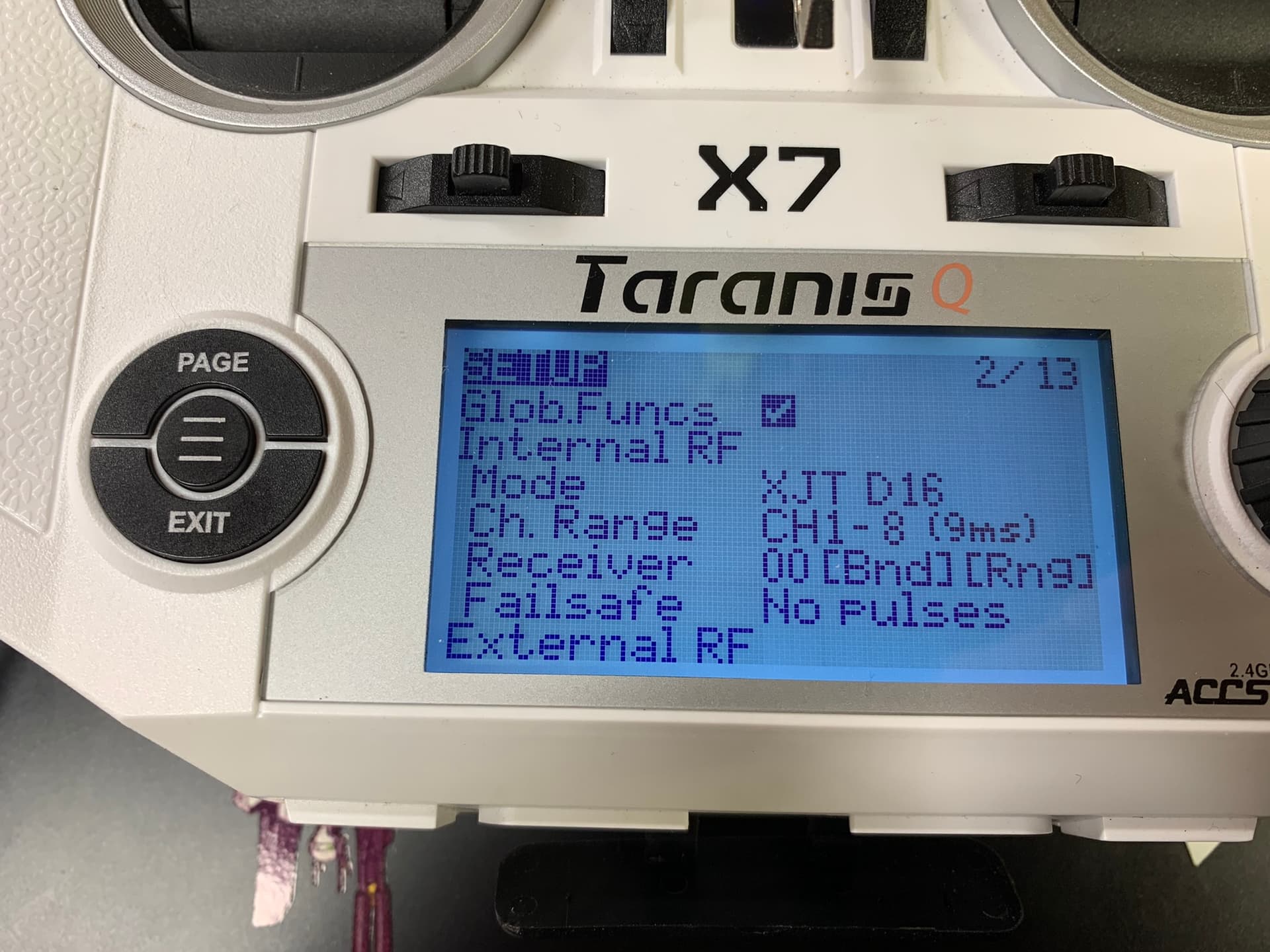
First, I wanted to say thank you for this incredible technology and this wonderful forum! I am building a rover from a Razor Quad electric 4-wheeler. I have it completely working with basic RC gear and have been watching some great YouTube channels in order to prepare for switching it over to running on Ardupilot. My problem seems to be the opposite of most. My rover has all of it’s RC functions even though it is not armed. I am running a FrSKY XR8 receiver and have the Pixhawk 4 connected to the SBUS port. I have the newset MissionPlanner, the most up to date ArduRover. I will include a bunch of screenshots to add any details that I don’t realize I am missing. I have gone through the set-up and have completed all the necessary calibrations except the ESC calibration.
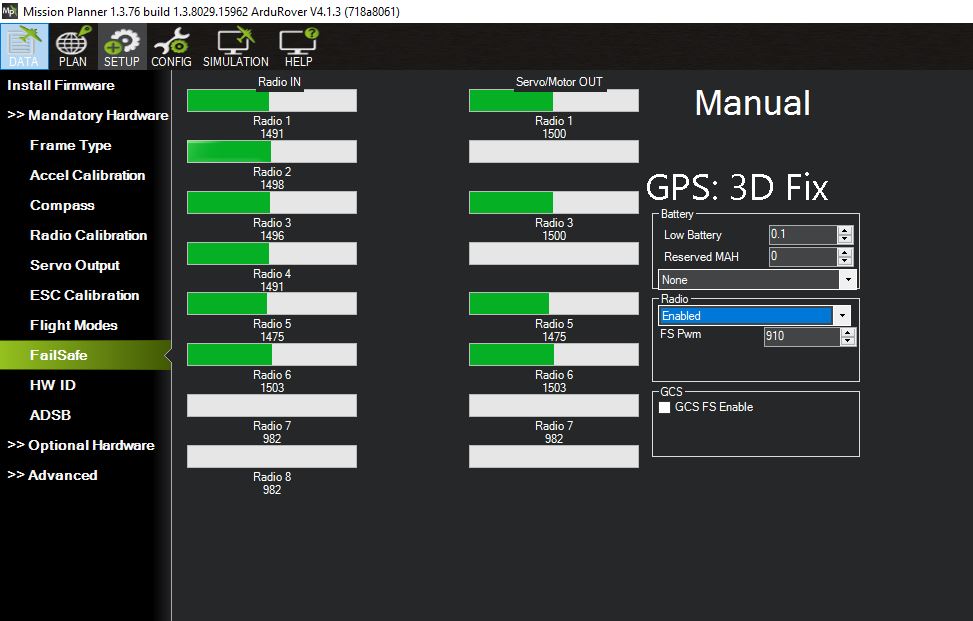
I think you have it wired incorrectly. All of your servos and ESCs need to be connected to the PWM outputs on the Pixhawk, not the RC receiver. By the looks of it, the Pixhawk is doing nothing for you other than blinking and looking pretty
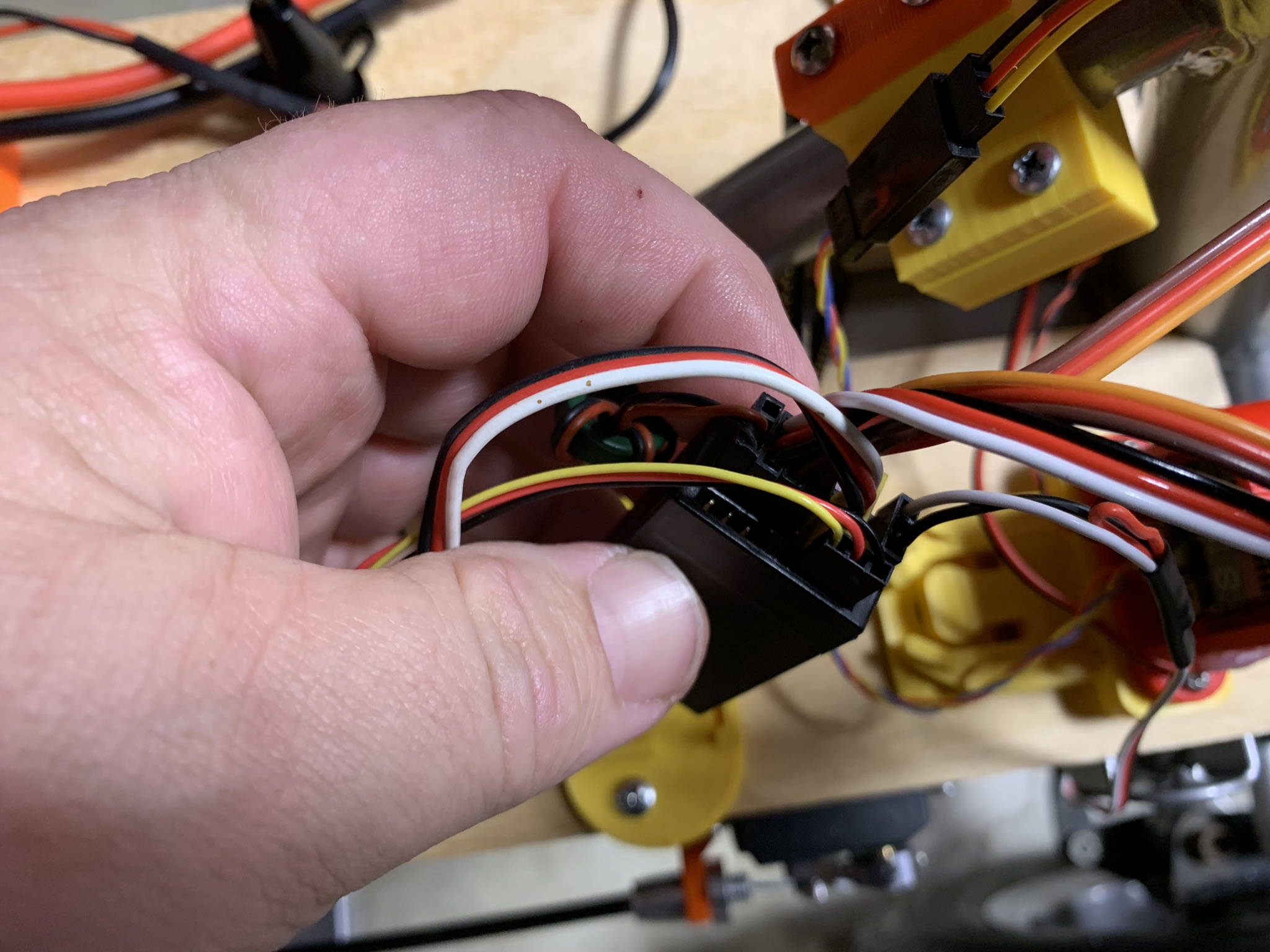
I’ve never used that version, but the “bottom” two connectors appear to be what you need. Did it come with some peripheral connectors that will accept 0.1" pitch DuPont (servo) connectors?
Thanks for the help, yeah it comes with what looks to be break-out boards. In hindsight, I shouldn’t have gotten the Pixhawk 4 but the Durandal or Mini Pixhawk as since the connections on those look to be built in. Now I have one more thing to add and build covers for. Also, I “only” purchased the small PM board to go with the 4 so I’ll have to piece together whether to use the I/O connectors or the FMU connectors (hopefully not both). Thanks again.
Tom
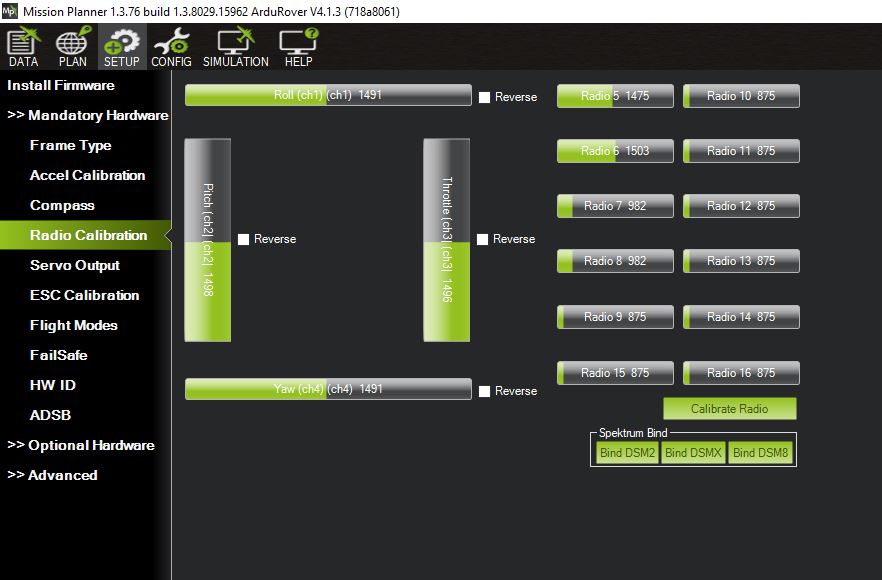
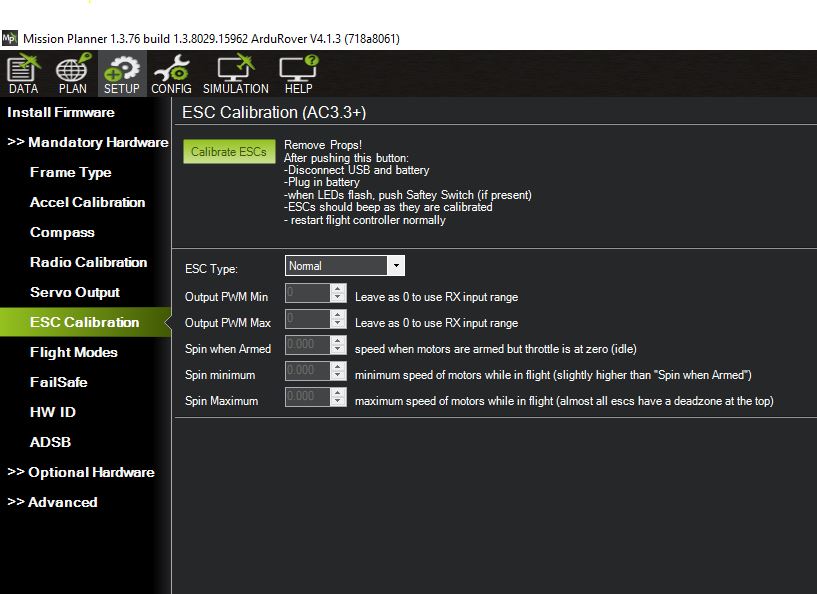
Last noob question for the night, I promise. I have a spring throttle stick so I assume when I calibrate it and when you finish it says to put throttle to low position, I am supposed to put it to the middle (1500) position? Not sure about that but when I am looking at trying to arm the rover I am getting an error. “PreArm: Throttle radio min too high”. Is this due to not calibrating it correctly or am I not holding the throttle in the correct position when trying to arm or is it an incorrect setting in the setup? Any help is appreciated and thank you in advance.
Tom
Well, I think they are assuming you will use their power management/distribution board and all of the servos would run to it in some sort of quad copter build or something. I wish I had done some more research and picked a board that had the rc pins integrated into the design but that’s the way it goes. I may end up ordering their bigger power board since I’ll probably only build one rover and just build a large enclosure for the entire FC and distribution board.
The pre-arm warning, “PreArm: Throttle radio min too high” means that during RC calibration it recorded a very high PWM value (above 1300pwm). Maybe during the calibration you didn’t move the throttle channel to its lowest position?
Hello,
I know this is an old topic, but I’m interested in this conversion (electric quad) to rover. What type of motor controller did you use (with pwm output to RX?) ;
Thank you for your understanding.