First, that looks great by comparison to where you started!
But I must apologize for suggesting that you should decrease any steering rate parameter in my last message - I must’ve mistaken “actual” and “desired” for one another when watching your video.
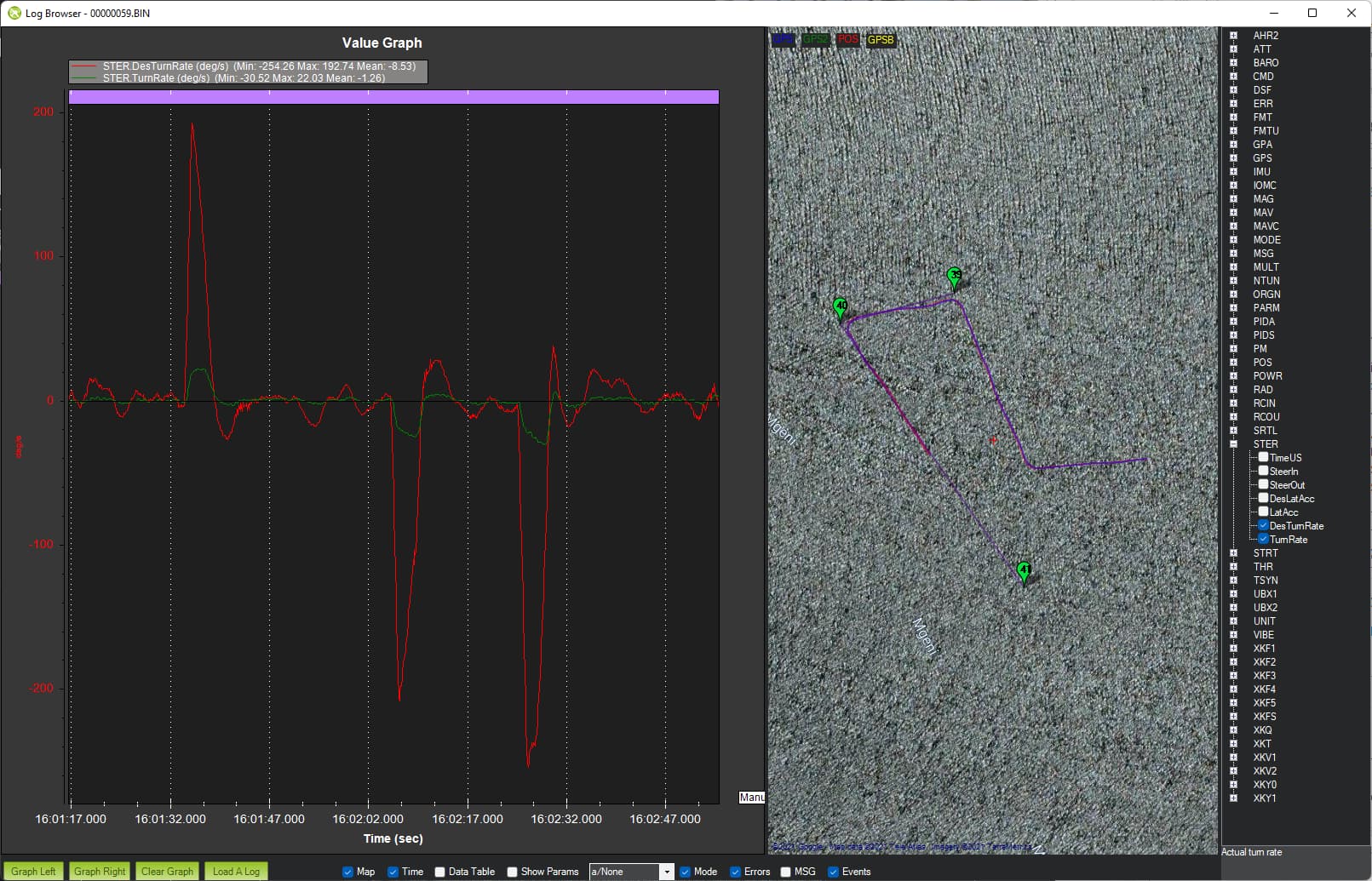
In the log, it’s very clear that actual turn rate never comes close to desired, as Randy observed. I think by decreasing ATC_STR_RAT_FF the way you did (probably at my mistaken suggestion), you probably masked the NAVL1 oscillation, making the tune appear better, but actually hurting performance.
I fully agree with Randy that to achieve best results, we need to get the steering controller behaving better by reducing ATC_TURN_MAX_G significantly and then driving ATC_STR_RAT_FF up accordingly. This will feel like going back to the drawing board, but the outcome will be far improved if you stick with it.
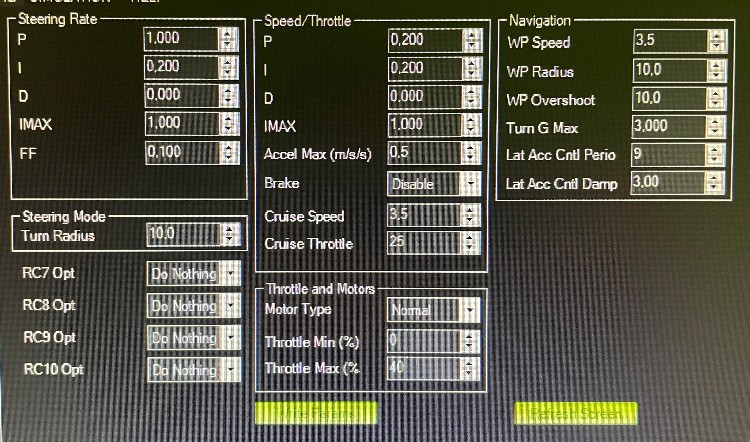
For your next session, go with Randy’s suggestion of ATC_STR_RAT_MAX=50 and ATC_TURN_MAX_G=0.15 (or very slightly higher). Set ATC_STR_RAT_P=0, and get aggressive with ATC_STR_RAT_FF - a value of 2 or more may be required (but increase in small increments - erratic behavior is highly possible if you set FF too high). We can add some P and I values into the mix as necessary once FF is increased enough to achieve a decent turn.
Also, I’m still seeing room to decrease that WP_RADIUS value. The turns are happening earlier than necessary in most cases, and we know your boat can achieve turn radii of half the set value.
Lastly, your throttle still appears to be saturating quite a bit with your imposed limit of 45% - it’s probably worth allowing a bit more throttle range if you can.
EDIT:
And a small footnote - if you elect to just accept a poor but seemingly well-behaved tune, the vehicle will probably behave predictably so long as conditions are nearly the same as during the test/tune sessions. However, when a variable changes (like wind, chop, etc), things could get out of hand very quickly because the controllers are already performing poorly despite observed “good” results.
I experienced a lot of that while tuning my mower. It’s very easy to arrive at offsetting errors that make the results look very pretty, but one hard jostle could cause things to go badly, oscillating out of control rather than dampening and regaining course/control.