The above firmwares (copter and rover) where tested within 10 minutes. The fix with copter was quick (less than a minute) but with the rover firmware, no fix, even 5 minutes later.
My base is a Stonex 3rd party GNSS.
Do you now how to fix it? I want to use RTK with my rover.
Thank you
If you are onto RTK Float fix status then the data injections must be working. The normal problems are signal reception quality. Are you swapping between rover/copter on the same hardware configuration, or are these different vehicles?
That’s sounds strange to me also.
I have to inform that I am for a week only user of pixhawk (holybro pixhawk 4) and ardupilot. So, I do not know many things.
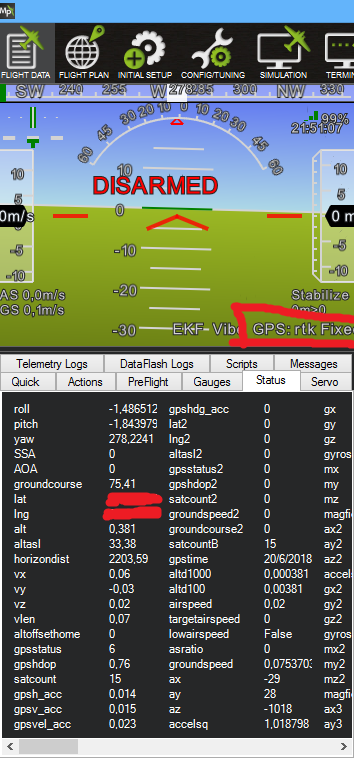
My interest is the boat, so I chose the rover. I installed it and for the first 6 days I was trying to make the gps rtk-fix without success. Always I got float. So, for testing, today the first step was to flash the copter.
The fix was within I minute. I felt very happy that was not hardware failure.
Then immediately I flashed the rover. But even 5 minutes later the status remained float, the same as the previous days.
After flashing I do not make any change to settings. Only modify the serial1 baud rate and protocol to mavlink2. The telemetry is the esp8266.
The surrounding environment is open sky.
I will try the same later today in order to validate these results.
I use rover with rtk gps. The corrections required for a float solution are the same as that required for a fix solution. If your gps is not achieving a fix solution then it will be due to reception quality and or constellation. My gps requires 37dB/Hz min x 7 satellites for a fix solution and can still run into issues with visibility, constellation, multipath… Out in the open with no obstruction within 15 deg of the horizon my unit can still drop to a float solution around 10% of the time. Using a decent dual band active antenna with a good ground plane helped me a lot.