Rotation changing ROI in a mission is possible in copter. Assuming for example four ROI’s NSEW in a mission, the trick is to place a delay before next ROI.
This can make sense in those rovers that can rotate, such as skid steer and balance bot.
But if I try this simple mission in v4.3dev:
QGC WPL 110
0 1 0 16 0 0 0 0 40.1 -3.1 630.460022
1 0 10 22 0 0 0 0 40.1 -3.100008 1
2 0 0 93 7 0 0 0 0 0 0 1
3 0 3 201 0 0 0 0 40.1 -3.09999494 1
4 0 3 16 0 0 0 0 40.09999494 -3.09999494
5 0 0 93 7 0 0 0 0 0 0 1
6 0 3 201 0 0 0 0 40.09999494 -3.09998770
7 0 0 93 7 0 0 0 0 0 0 1
8 0 3 201 0 0 0 0 40.09998950 -3.09999494
9 0 0 93 7 0 0 0 0 0 0 1
10 0 3 201 0 0 0 0 40.09999494 -3.10000230
11 0 0 177 2 -1 0 0 0 0 0 1
12 0 3 21 0 0 0 0 40.1 -3.1 1 1
(continuous mission, 3/6/8/10 are the four ROI’s (orange balloons), 7" delay in fifth column is big)
it just seldom rotates:
http://youtube.com/watch?v=T5NAY4C373U
as can be seen in the video index.
(Test done indoors. An indoor mission works without GPS using the wheel encoders on this balance bot, as can be seen here and here).
Version is 4.3dev. Tried also v4.2.1 and it doesn’t rotate at all.
DesYaw-Yaw:
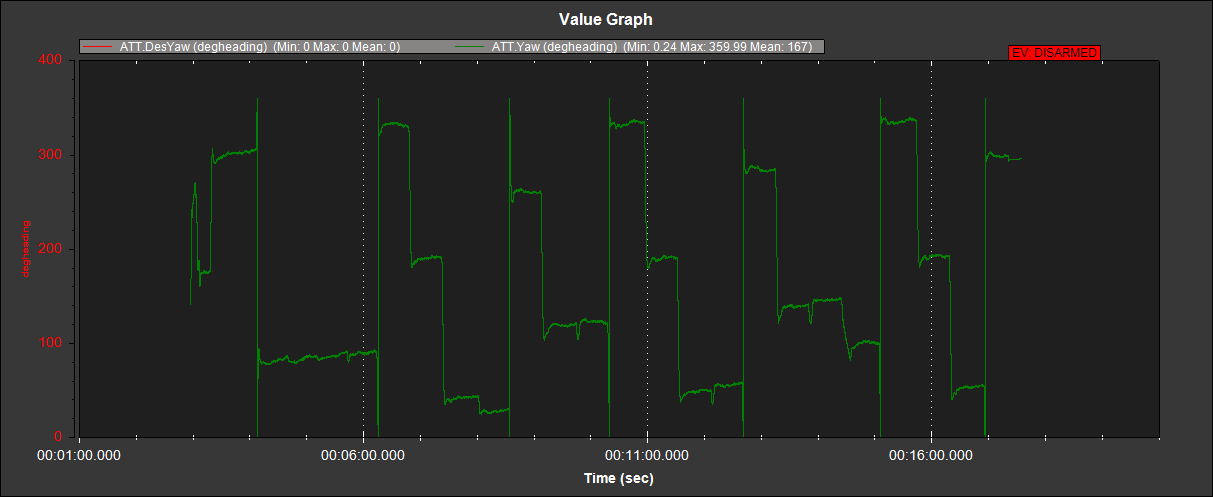
No sense: DesYaw 0.
Should it work?