I tested the new autotune and master on my Runt rover.
The tune worked really well. No over-tuning this time … it felt very nice running in ACRO mode.
Only issue I had was getting the cruise speed/throttle correct. The QuikTune requires a min speed of 0.5m/s, and my rover was having a little trouble reaching that, as its usual cruise speed is 0.6m/s. The initial cruise speed and throttle were 0.58m/s and 95% respectively, where it should be closer to 70%. I’m putting it down to my rover’s speed being fairly marginal, rather than the Quiktune though.
Not sure if there should be some upper limit on the cruise throttle estimate, particularly for skid-steer vehicles?
Navigation and pivot turn tuning were fairly straightforward afterwards.
Below is an auto mission with pivot turns (clockwise vehicle movement):
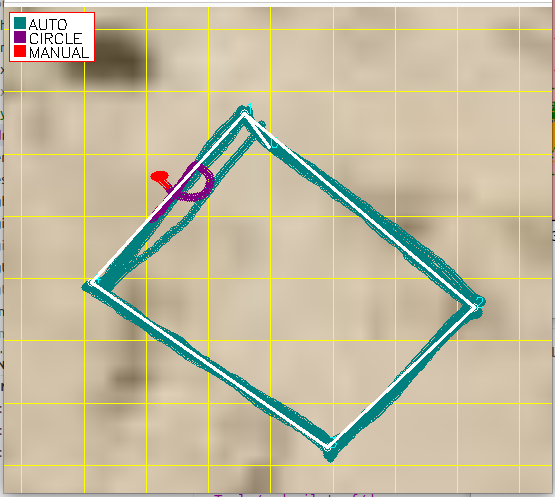

The pivot turns are really nice now. There’s a little bit over overshoot, likely due to a too high ATC_STR_ANG_P.
For reference, my tuned parameters are:
ATC_STR_ANG_P 4.000000
ATC_STR_RAT_D 0.020282
ATC_STR_RAT_FF 0.660293
ATC_STR_RAT_I 0.330146
ATC_STR_RAT_IMAX 0.400000
ATC_STR_RAT_MAX 90.000000
ATC_STR_RAT_P 0.330146
ATC_STR_RAT_MAX 90.000000
ATC_STR_ACC_MAX 180.000000
ATC_SPEED_D 0.007409
ATC_SPEED_FF 0.000000
ATC_SPEED_I 1.714367
ATC_SPEED_IMAX 0.300000
ATC_SPEED_P 1.714367
CRUISE_SPEED 0.600000
CRUISE_THROTTLE 80
PSC_POS_P 0.200000
PSC_VEL_D 0.050000
PSC_VEL_FF 0.305000
PSC_VEL_FLTD 5.000000
PSC_VEL_FLTE 5.000000
PSC_VEL_I 0.010000
PSC_VEL_IMAX 1.000000
PSC_VEL_P 1.200000
WP_PIVOT_ANGLE 45
WP_PIVOT_DELAY 0.000000
WP_PIVOT_RATE 90