Hello All,
I have a 3D printed tank running ArduRover 3.5.1 with an AUAV-X2.
In Steering- and Auto-mode the tank turns only very litte to the left, even with RC-stick full left. Steering to the right works well.
With centered RC-stick the tank does not go straight, already turns right.
I think the steering controller is tuned OK so far, although the PID values are quite small. Compass seems to be OK.
In Manual- and Acro-Mode the tank drives straight.
Does anybody have an idea why the tank has a problem to turn left in Steering/Auto mode?
The same thing happens with a different rover, also ArduRover 3.5.1
OpenRC Tractor https://www.thingiverse.com/thing:1967086
Equipped with a Omnibus Nano V6.
I have no logs for the tractor.
I don’t see anything immediately wrong. The turn rate controller seems to be performing pretty well actually. I wonder if it might be the transmitter… I see that ARMING_CHECK = 0 and the RC input hasn’t been calibrated.
I think it might be good to turn back on arming checks (i.e. ARMING_CHECK = 1) and do the RC calibration. Sorry, I know that arming checks can be annoying but often they catch problems and then give a short description of the issue.
Thank you Randy!
I activated ARMING_CHECK and made RC calibration.
I use a Spektrum satellite receiver.
But rover still doesn’t turn well to the left.
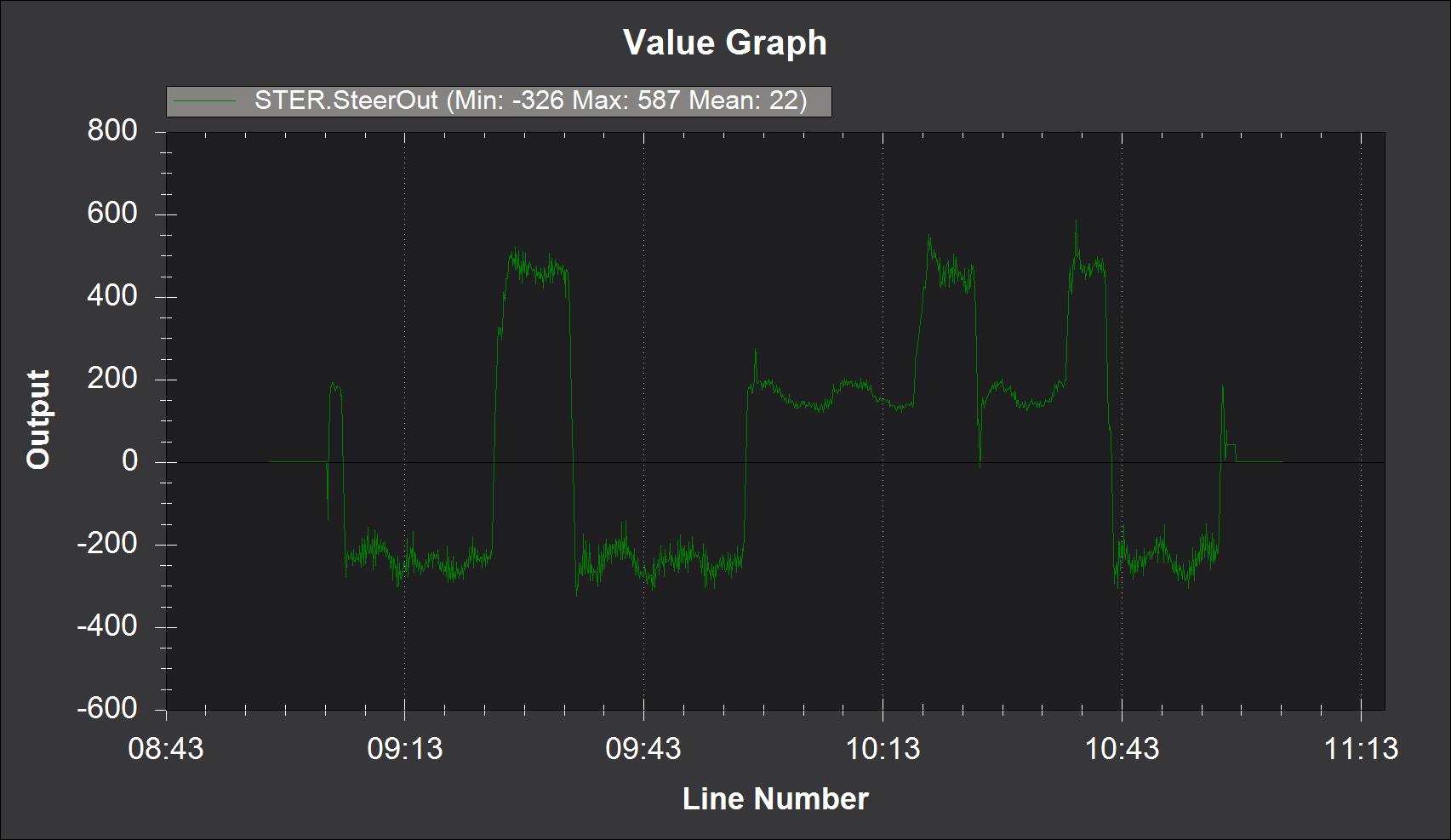
It is strange, that in Auto- and Steering mode PIDDESIRED is already very small to the left. About half the value compared to right turns.
It looks like the rate controller doesn’t request a left turn.
Also strange, that I have the same problem with two completely different rover: Tank and Tractor.
The Tank from the attached BIN-Log:
AUAV-X2 (1st generation) is rotated 270 deg. AHRS_ORIENTATION 6 (Yaw 270)
Only AUAV-X2 internal compass used, but seems to work OK.
The Tractor (no BIN-Log, but the same problem)
Omnibus Nano V6 mounted vertical AHRS_ORIENTATION 29 (Roll 180 Pitch 90)
Compass looks good for both of them. No Compass error messages in Mission Planner.
Heading looks good in Mission Planner.
btw: Rover 3.5.1 still suffers on sporatic parameter reset on Omnibus Nano V6 board.
With rover 3.5.1 I increased “Steering control Angel P gain” (ATC_STR_ANG_P) to 6.0 and reduced “Steering Rate P/I” accordingly.
Worked much better, but somtimes still wide left turns in auto mode.
Tried rover-4.0.0-rc1. Much better! Worked as expected so far.
So for me this issue is solved with rover-4.0.0.
@RainFly, OK, great that 4.0.0 is working better although as far as I know we haven’t changed much in this area. Perhaps there are some lower level board changes related ot the Omnibus Nano V6 board that explain the change