So I’ve scoured blog posts everywhere and I’m not getting any Ch3output change. Ive verified doing the two motor tests for the rover, steering and throttle work well. Plus I am receiving RC input.
For “Ch3 output” you mean the “ch3out” or “ch3percent” shown below? Or something else maybe?

It might be good to provide an onboard log if possible.
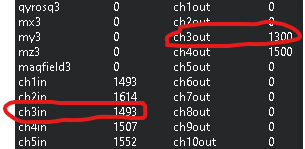
This is my normal values for no input placed. Channel 3 is circled
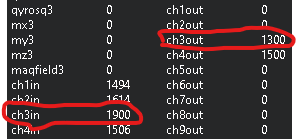
This is my response when increasing the throttle, it takes in channel3input but no channel 3 output. Yet it works when I do steering.
Thank you for any help!
Here is my servo output. If I increase the trim of the throttle there is response from my motors. It just seems to be an issue where the ch3in is not changing the ch3out.

I suspect the issue is the vehicle isn’t armed (see wiki here) or the safety switch needs to be disabled (BRD_SAFETYENABLE = 0). It’s a bit of a guess, if you’ve got an onboard log I can be more sure.
@rmackay9
Yes we made sure the vehicle is armed and also disabled the safety switch. I’ll get you the data log tomorrow as I currently don’t have the rover with me.
1 Like
Is the vehicle in hold mode or failsafe?