I have an issue with the auto flight mode.
When I turn on the Pixhawk and set the transmitter to auto mode it drive just fine and stops at the final W.P.
Right after it stops, I switch flight mode to manual and immediately return to to auto. for some reason at that point my rover drive into places that not even close to the written mission and not execute the auto mission again as expected.
do you have a log and your mission file ? I make some try on SITL and restarting auto should work. If you can share a log and your mission I can try to redo it and see if I can track the bug
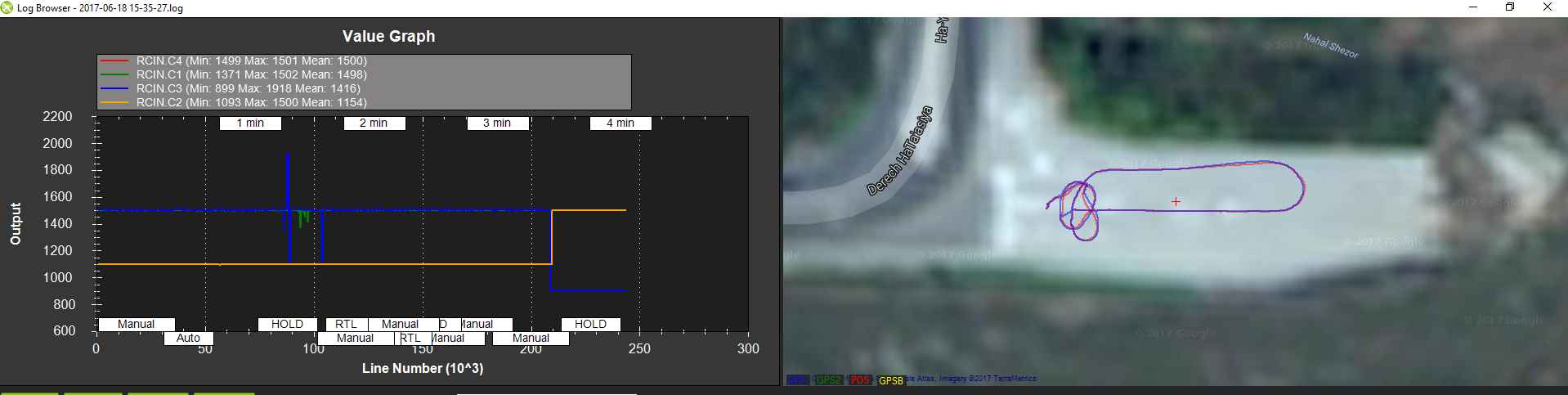
I opened the log review and try to figure what the problem is.
I can see that the rover goes into HOLD and I cant figure why.
When failsafe occur it should go into HOLD mode so it may be it?
any help with this will be appreciated !