Long story. Had the Kakute H743 set up and running fine on my skidsteer tank. Got a low voltage error that corrupted memory, so had to clear and reload ardurover. Now trying to reconstruct how to restart it. I rewired it the way it was and its not as simple as reloading previous parameter set: had to reconfigure most of the pieces. Pieces are: RC rcvr, 915 telemetry radio, 2 drive motor esc, CUAV C-RTK2 HP with built-in compass. I went through calib: accel says it worked, Compass said it worked, RC Radio calib is working, servo output looks right. It can find the GPS (gets “3D dgps” on HUD and 13 satellites in pre-arm checklist), compass… It is sitting on my porch and I’m trying to set manual mode, arm and move it out of my porch with RC transmitter. I keep getting EKF Failsafe message, and can’t get past it. I didn’t realize that it would stop the rover from arming even in manual mode. I click on EKF in HUD display and get a graph with all factors at 0 except altitude very low. 0 is good, and 1 is bad, so no indication from that what the problem is.
Can you post a logfile? See Downloading and Analyzing Data Logs in Mission Planner — Copter documentation for details
I’ll venture a guess that the moving baseline config doesn’t have a yaw solution, which likely makes the EKF unhappy.
Thanks! Interesting. Yaw does seem to be the issue. The option 3 is set to allow compass backup for yaw. Wonder if my compass is not reading properly? Its in the CUAV. Perhaps I should set compass only and see if it gets a reading?
I have never set up log files and will look at the link. I also got a no log warning before arming. I do have a SD card in the H743.
Compass fallback doesn’t mean arming checks pass when the primary system is failed.
Thanks. So if gps is not right, even with compass fallback I’ll still get EKF failsafe. GPS status shows 3D dgps. So must mean that the moving base is not correct? Maybe a config error? Perhaps an antenna 2 wiring problem? I’ll start there. A couple more quick questions to help my diagnostics. Why do I get a EKF failsafe in manual mode? I thought manual didn’t look at attitude and altitude? I clicked on EKF in the HUD display to get some further diagnostics and it showed all OK. (0=good, 1=bad). The only one showing non-zero is vertical position and even that is within tolerance. I’m going to double check configurations, esp gps, perhaps run on compass only, to get some more information. Also going to try to diagnose logging and why that doesn’t work. I’m dead in the water for a few days, though.
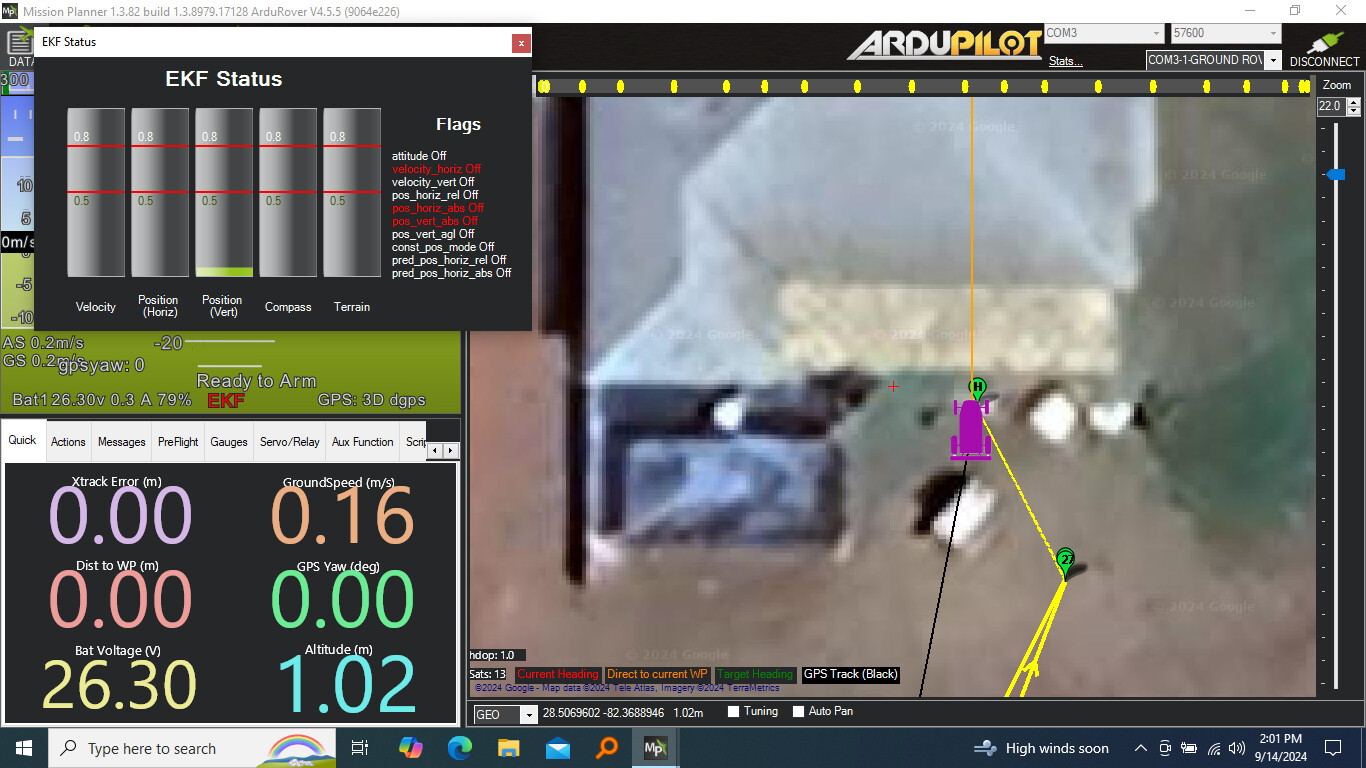
Arming checks prevent arming. Mode is mostly inconsequential. With a UM982, fix type is not indicative of GPS yaw state. But you can monitor that as well…and it shows 0 in your screenshot, which probably means uninitialized.
You can disable INS/GPS arming checks to see if that has a positive effect on your situation. But I don’t recommend leaving them that way, as the checks are there for a reason.
I was guessing at the root cause, as you said it was on your porch, meaning likely obstruction to GPS reception.
A log would be helpful, as already stated.
Awesome analysis. Thanks Yuri. I’ll double check the config to make sure I have not made an error. And pick up the tank and move it to the backyard, if that helps get sats. And try to make logging work. Will be a couple days…
OK. Yuri. I’ve been reading a lot more about failsafe. Win, lose or draw, the EKF is supposed to have 2 factors in the red for rover (1 for copter) to go into failsafe mode. Clearly that is not true here. I understand Arming checks prevent arming. Even if it does, I’m supposed to be able to switch to manual mode to be able to control it and run it home. If I came on the vehicle in the field after a “landing” due to EKF failsafe, even if it were off and needed to be turned on, I should be able to arm in manual mode and return home. It seems like keeping me from arming in manual mode is counter to that in two ways: I don’t have any EKF factors in the red, and manual mode is supposed to supersede EKF failsafe anyway. I can try to disable it, or just carry the tank to the back yard to get a better fix, but I still don’t understand this ardurover behavior. I probably still have some sensor issues to diagnose, but it may be as simple as seeing more satellites. And it never did that before, even before when using the LC29 and my $8 compass that regularly had poor data. And I should still be able to arm it in manual mode in porch or garage and move it out to see sats. I have upgraded ardurover to 5 (was 4 before) not yet to 6. And MP upgraded from 79 to 82. My intent is to still proceed as I described last post. I am too new to be declaring a problem with the software, but I still don’t understand this behavior. I can try to post more screenshots and activate logging for more diagnostic information. Life is beginning to intrude on my ardurover journey, however and my time is becoming limited.