I am able to command the rover to run in auto mode. But when i attempt to run in auto mode, the rover didn’t exactly reach the exact waypoint intended.
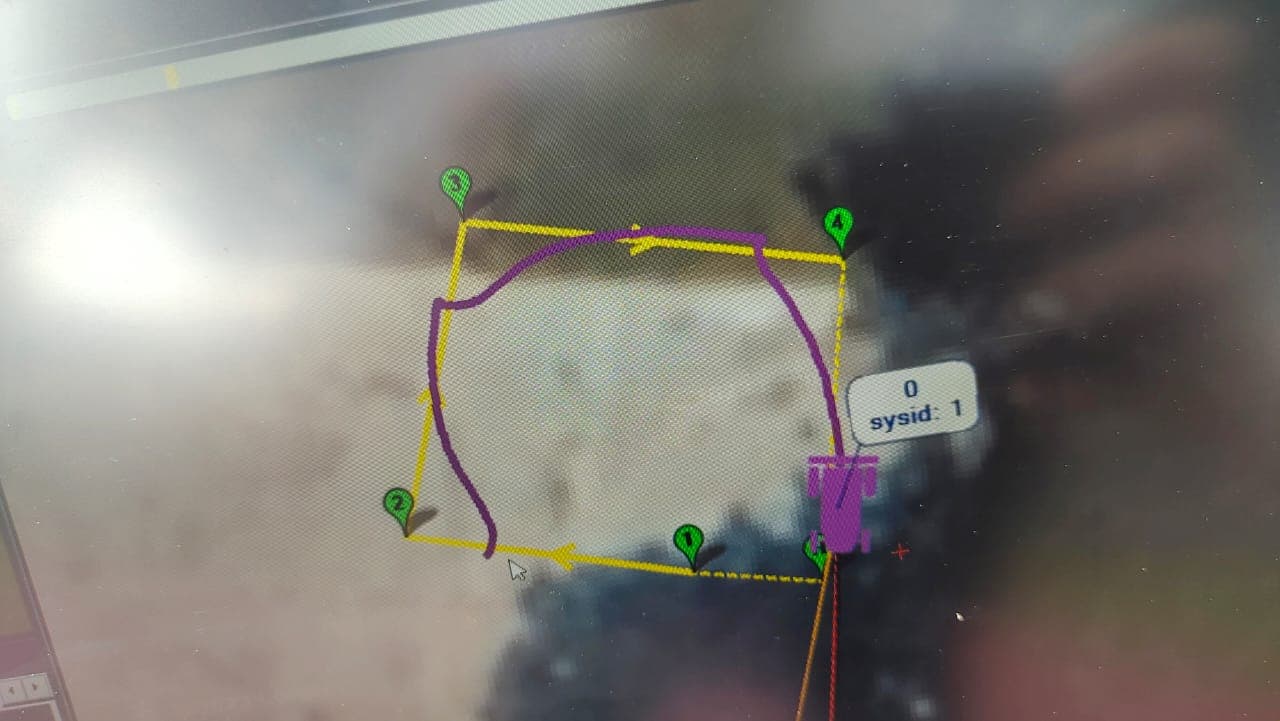
From the picture, there is some distance left in the waypoint and it travel to the next waypoint without travel close to that position.
I am using skid steering mode to drive the rover.
I am out of idea on how to correct this issue. Is it related to motor tuning?