Thanks for the report.
I think the issue you’re seeing is that the vehicle can’t keep up with the target moving around the circle. There’s a to-do on my list to slow down the speed of the target if the vehicle can’t keep up.
Thanks for the report.
I think the issue you’re seeing is that the vehicle can’t keep up with the target moving around the circle. There’s a to-do on my list to slow down the speed of the target if the vehicle can’t keep up.
Hey Randy, Im currently at 4.2.3 Rover, with a functional but not sweetly operating rover. Top speed is 0.7m/s and its skid steer with the quitek zealot H7 and 2x F9P’s.
I have the same but unfortunately i have a cube black.
Hey Paul - hows your tune going. Our mower is excellent - but just got the GPS’s sorted. The NTRIP station 19km away was too far for RTK fixed, it kept dropping to floating - no idea what the steering implications were, but now solid RTKFixed with local corrections. When it stops raining, i’ll post the settings we settle on for decent pivot turns. Strait line is awesome currently, pivots are 50/50 perfect or terrible. Standard tuning process just beginning now hw is solid. Its wide, but its slow…
So I’ve now figured out the circle-accuracy issue.
The circle mode defines a “edge” to the circle, which is equal to the TURN_RADIUS. Interestingly, this is constrained to a lower limit of 1m via AR_CIRCLE_REACHED_EDGE_DIST (ardupilot/Rover/mode_circle.cpp at master · ArduPilot/ardupilot · GitHub). So the Rover will tend to wander within a minimum 1m distance of the circle track.
For Rovers doing a small (less than a few m radius) circle, a 1m wander will be fairly bad. I lowered AR_CIRCLE_REACHED_EDGE_DIST to 0.2 and I’ve now got really good circle tracking:
This is a 2m radius circle at 0.6m/s:
I ran the Quicktune again and got quite good results. So I’m happy now ![]()
I’ll make a PR to fix this issue.
EDIT: PR is at Rover: Lower minimum circle tracking distance by stephendade · Pull Request #24127 · ArduPilot/ardupilot · GitHub
Hi @stephendade - I performed Quicktune on a Rover that was already well tuned and performance degraded. Would there be any value in setting the parameters to Rover default and running it again? I have no problem treating this particular Rover as a test platform to further the development of the feature.
My guess is that it won’t help to go back to defaults. It should come up with mostly the same gains again.
It’s probably best to wait until I do some reviews with @tridge and @Leonardthall of the results so far to see if we can improve the QuikTune.
OK. I’ll standby for the next Rev of the script.
Once the new revision of the script comes out think I could snag a build with the cube yellow just replaced my boat with one of them I had laying around!
Great, I’ve added a CubeYellow to the build above.
so good autotune!i like it
I was finally able to get out and test this new quicktune!! It was very easy to setup and I especially like the way you have set it up to save the new gains. I hope once the copter autotune get a look over that this would also be included. I have a fairly sizeable log that had some driving around in manual and a cpl circle mode just to see how things went. As well as quite a bit of driving after the quicktune finished. I have always struggled with tuning as I don’t wholly understand what’s going on often. Thanks for the great feature @rmackay9
@rmackay9
I came out to test out the quicktune on a boat i had built long ago to see how it would do but I think i have setup something wrong. It drives fine in manual but as soon as i flick into circle it does circles but very tightly like in the video https://photos.app.goo.gl/SnEH9dVeqrEaEeF76. It is setup like a skidsteer rover with a left and right motor. I have my cicrle radius up to 10 m but cannot seem to get it to work. I will update this with a bin once out of the field.
Txs for the feedback. The issue is most likely that the RC inputs and servo outputs are both reversed. The Mission Planner’s motor test should highlight the problem. I suspect you’ll see the same issue in acro mode and auto.
Randy could you please do one for the CUAV V6X?
I was able to get out and do some testing of the quicktune on a skidsteer boat today, this log has two different quicktune tried see below. I first did a 10m circle then I did some driving around tired guided mode which didn’t seem to do well after the 10m quicktune, there was a lot of oscillation @20:40:44. So I decided to do another quicktune with larger circles this time being 30m afterwards guided mode seemed to work much better.
the second log just has some guided and rtl nothing much to really see. I have the exact same motors, esc are also set to same value which was verified in blheli and they are both set to 1000-2000 pwm value in the servo tab as well as all trims center on the rc transmitter but there is a little bias on which side has more power is there a auto trim function or should I manually adjust it in the servo tab. the second log probably at the very end shows this bias best.
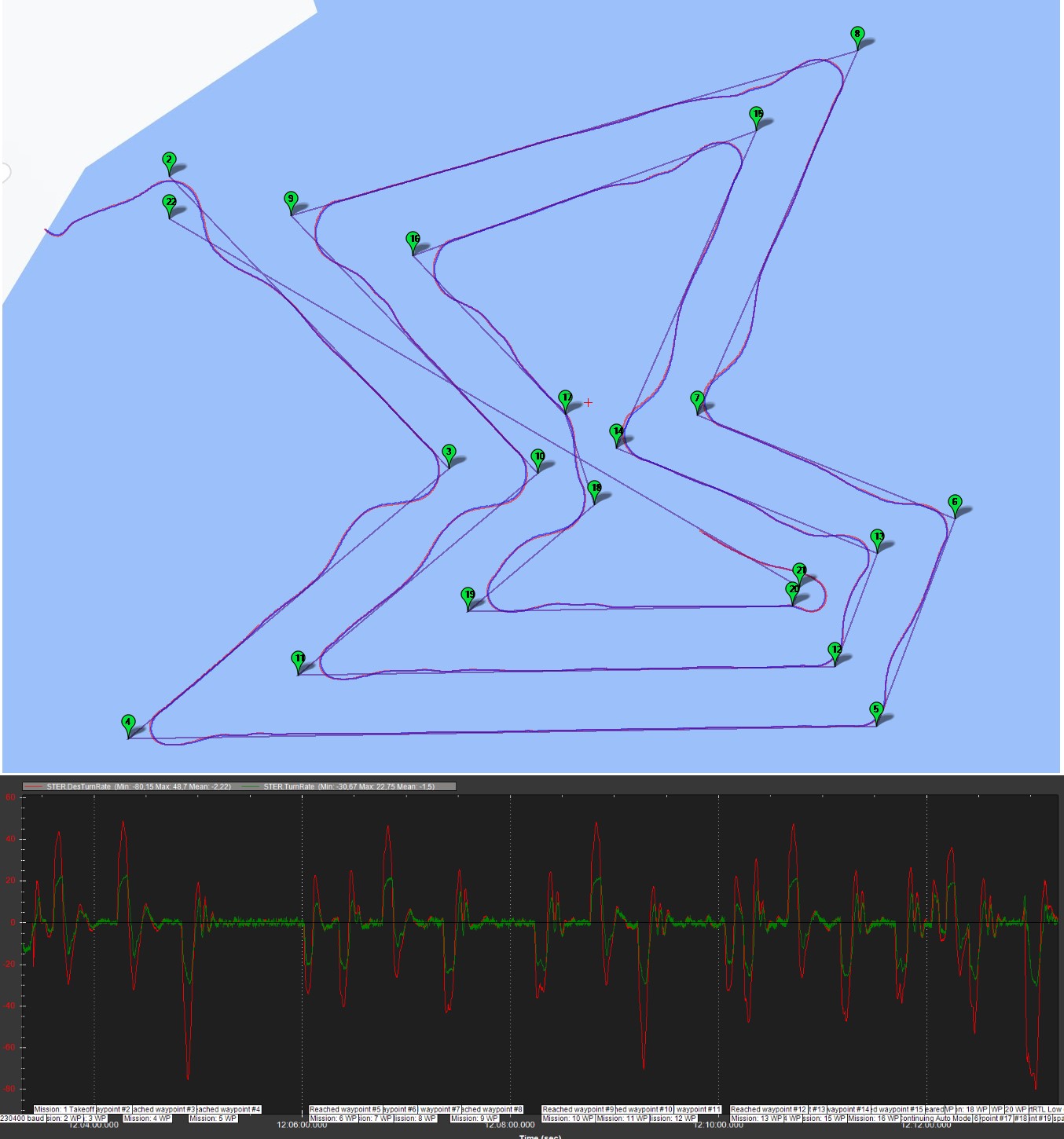
It has been a long couple of months building the new boats for our new FishTec franchises in Europe but I was able to get on the water for the first time with one of the new AIMy430’s yesterday.
It wasn’t too bad but there is definitely too much throttle in the right and obtuse angle turns, where the acute angle turns are a little better.
How can I restrict the throttle in the turns?
Also noted Rover4.4 doesn’t like the waypoints too close as seen in wpt20-21.
Here is the log - 00000063.BIN - Google Drive
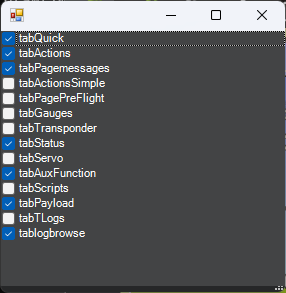
How do you get the aux function screen on mission planner?
To make MP’s aux function screen visible, hover over any of the existing tabs (on the Data screen) and then right-mouse-button-click and select “Customize” and then check the “tabAuxFunctions” checkbox.
Hi @John_Easton,
Sorry for not responding earlier. I saw your note about getting a CUAV V6X binary so I will produce that shortly. I delayed slightly because we’re planning a Rover-4.4.0-beta4 release soon but I’ll go ahead and create a separate binary in any case.