Thanks for the report and log. There shouldn’t have been any control changes in the 4.5 release compared with 4.4 so I guess this is a new vehicle or the physical steering mechanism has been changed?
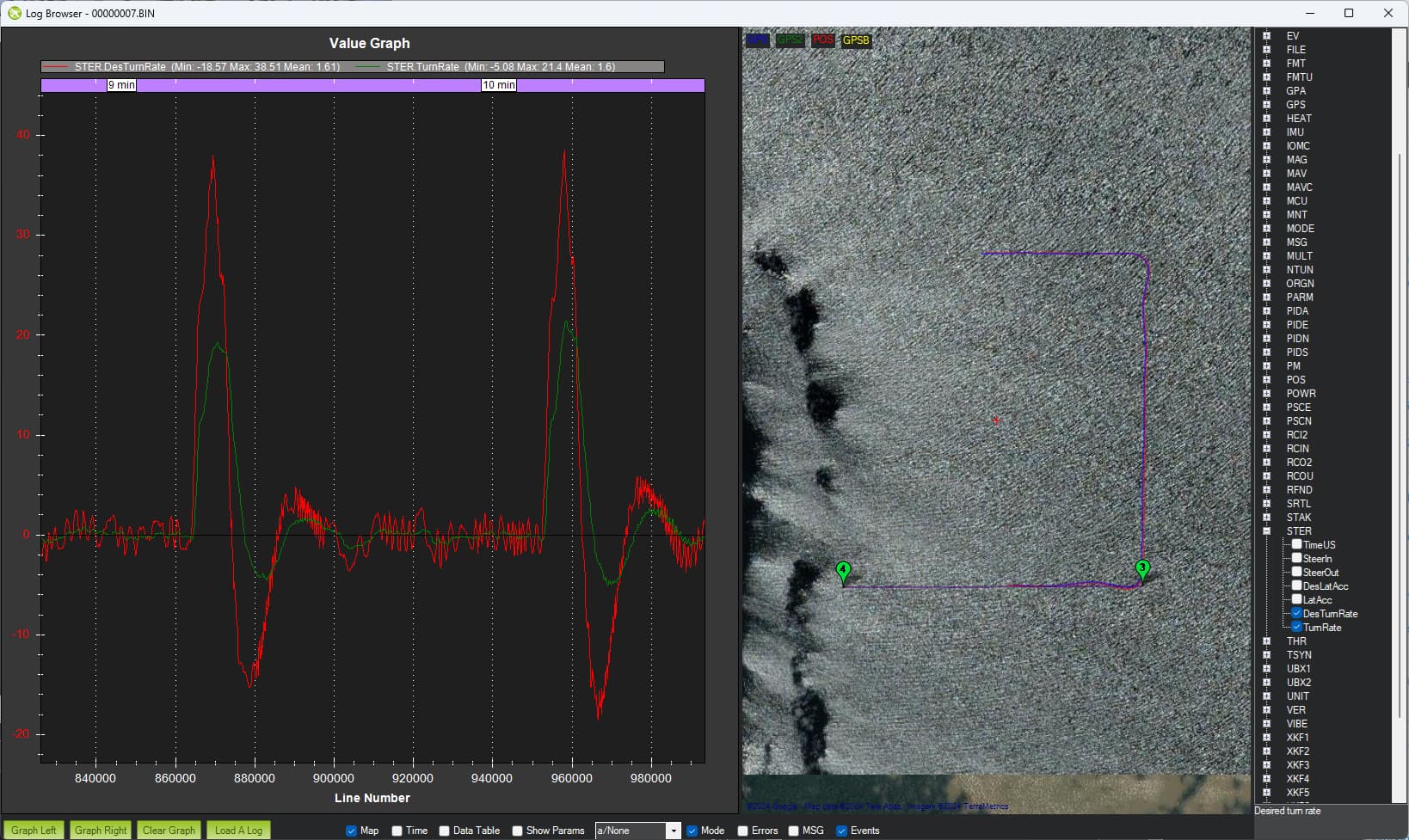
It looks like you’ve reduced ATC_STR_RAT_FF and P from 0.2 to 0.05 and that seems to be working OK. Below is a graph of the desired turn rate (in red) vs the actual (in green) and we see that it’s underperforming (e.g. the actual is not reaching the desired) which indicates that the FF and P should be raised a bit more. It looks like you tried ATC_STR_RAT_FF=0.1 and it started oscillating again so something in between 0.05 and 0.1.
The problem with it underperforming like this is that it leads to I term build up which causes a slower oscillation. I think when the boat is going around the corners it should be putting the motor completely left or right … once it reaches the physical limitations (e.g. RC1_MIN or RC1_MAX) the I-term will also stop building up.
Nice build you’ve got there. I’ve also built a pretty large rover (4x10 meters), now trying to figure out a good tuning for the steering controller. Learned a lot from your discussions here on the forum. Anyhow, I’m interested to know what type (and model if off-the-shelf) of actuator you’re using for your steering? It seems to be powerful and react very rapidly.