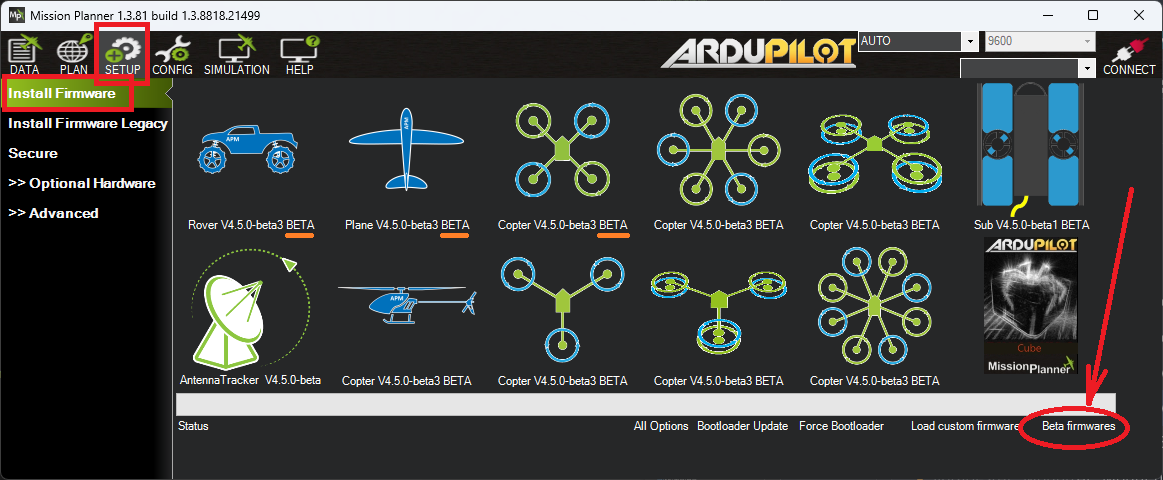
Rover-4.5.0-beta3 has been released and should appear in the ground stations within a couple of hours of this posting. Once that’s done you’ll be able to install it using MP or QGC’s beta firmwares links or the binary can be directly downloaded from firmware.ardupilot.org.
The changes vs -beta2 are in the release-notes and copied below.
- Board specific changes
- added PixFlamingo F7 board
- support ICM42688 on BlitzF745AIO
- fixed IMU orientation of CubeRedSecondary
- enable all FPV features on SpeedyBeeF405WING
- System level changes
- improved robustness of CRSF parser
- reduced memory used by DDS/ROS2
- added filesystem crc32 binding in lua scripting
- support visual odometry quality metric and added autoswitching lua script
- allow for expansion of fence storage to microSD for larger pologon fences
- allow FTP upload of fence and rally points
- fixed vehicle type of ship simulation for ship landing
- make severity level depend on generator error level in IE 2400 generator
- speed up initial GPS probe by using SERIALn_BAUD first
- allow NanoRadar radar and proximity sensor to share the CAN bus
- added MR72 CAN proximity sensor
- only produce *_with_bl.hex not *.hex in builds if bootloader available
- fixed check for GPS antenna separation in moving baseline yaw
- added GPS_DRV_OPTIONS options for fully parsing RTCMv3 stream
- fixed logging of RTCM fragments in GPS driver
- fixed video recording while armed
- robostness and logging improvements for ExternalAHRS
- fixed RPM from bdshot on boards with IOMCU
- fixed accel cal simple to remove unused IMUs
In terms of the stable release, we still have a few issues to resolve so there will be at least one more beta but any feedback we get will help us get there soon so keep it coming!