As mentioned in the last beta thread, Rover-4.4.0 has been released as the official / stable version. Changes versus the last beta are in the release notes but also copied below.
Autopilot related enhancement and fixes
CubeOrange Sim-on-hardware compilation fix
RADIX2HD supports external I2C compasses
SpeedyBeeF405v4 support
Bug fixes
DroneCAN battery monitor with cell monitor SoC reporting fix
ProfiLED output fixed in both Notify and Scripting
Scripting bug that could cause crash if parameters were added in flight
STAT_BOOTCNT param fix (was not updating in some cases)
don’t query hobbywing DroneCAN ESC IDs while armed
Rover specific changes
Auto mode keeps navigating while paused at waypoints (reduces overshoot)
QuikTune script simplification (only tunes rate and speed controllers)
Torqeedo battery nearly empty reporting fix
The list of changes versus the last stable release (4.2.3) are too numerous to list up so perhaps it is enough to refer people to the Copter-4.4.0 release notice and just focus on the Rover specific changes which are mostly in the navigation area.
The L1 controller has been replaced with SCurves (the same basic navigation as used in Copter)
Pivot turns improvements including actively controlling position while turning (as much as possible)
QuikTune Lua script to ease tuning of the Steering TurnRate and speed controllers
Thanks again for everyone who has contributed to the beta testing and feedback!
Hi @rmackay9 . I updated the controller (pix) and even tested my speed sensor for the boat, everything is fine. in the lists, I found that starting from version 4.4.0-beta1 , ESP32 support has been added. But I did not find the firmware or any information about this board at all. Could you give me a hint?
A question I can’t find the answer to: Does the Matek h743 WLite support Lua-quicktune? After installing the 4.4 HEX, I don’t have a /scripts folder. So I added one but… will it work?
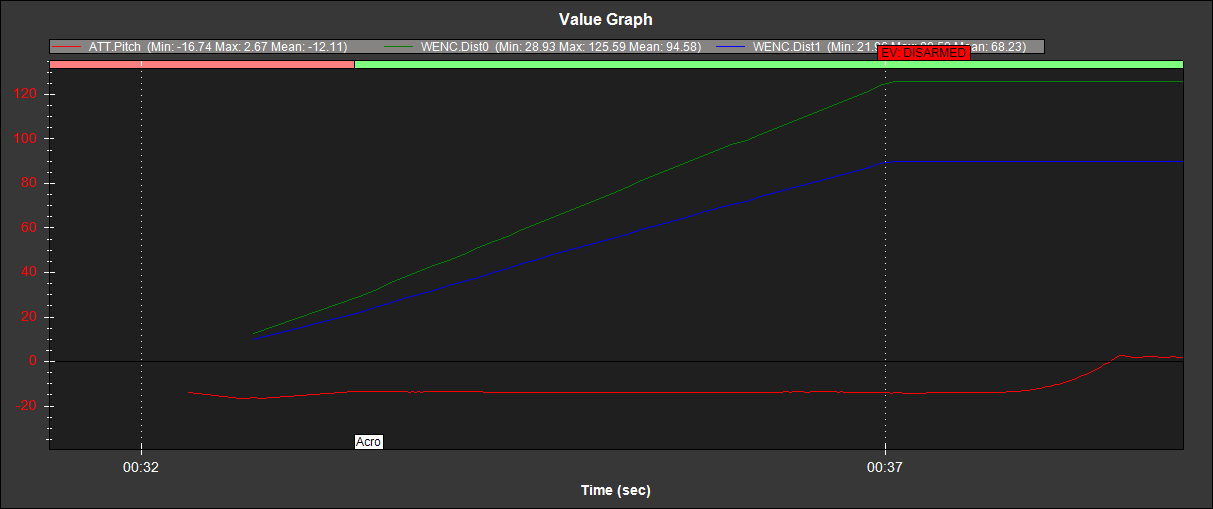
Strange inversion on a Balance Bot with PixRacer R15 FC (old, purchased before the Chipageddon) on v4.3+.
Trying to assemble recently a Balance Bot using a PixRacer R15 FC seems impossible, but it is possible with a similar MiniPix (only one connector differs, so it is easy to try one or the other). I prefer the PixRacer, since it has 2MB flash.
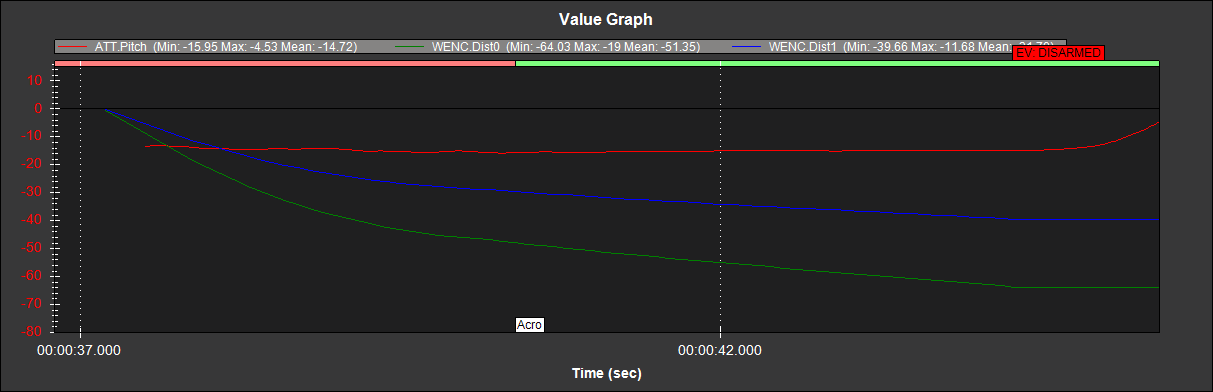
Motors test succeeds in all cases. The problem is best seen leaning forward the balance bot (negative pitch), arm a few seconds, and disarm. Wheels should move forward, and it is so up to v4.2.3 stable:
If I have to change any parameter (v4.3+), please illuminate me, but as said all is easy and works with a MiniPix (1MB flash), without any parameter change upgrading or downgrading (now working with v4.4 stable if mounting this FC).