Rover-4.3.0-beta2 has been released and can be installed using Mission Planner, QGC or it can be directly downloaded from firmware.ardupilot.org.
The changes vs 4.3.0-beta1 are in the release notes and also copied below
Autopilot specific fixes and enhancements
a) AIRLink autopilot supports UART2
b) CUAV V6X supports CAN battery monitor by default
c) MatekF405-CAN board uses less memory to fix compass calibration issues
d) Pixhawk1-1M only supports uBlox and NMEA GPSs to save flash space
e) SkystarsH7HD-bdshot (allows Bi-directional DShot)
f) SkystarsH7HD supports VTX power by default
EFI support
a) Currawong ECU support (added as Electronic Fuel Injection driver)
b) Scripting support for EFI drivers (allows writing EFI drivers in Lua)
c) SkyPower and HFE CAN EFI drivers (via scripting)
Safety features
a) Arming check that SPIN_MIN less than 0.3 and greater than SPIN_ARM
b) Arming option to disable itermittant display of pre-arm warnings (see ARMING_OPTIONS)
Minor enhancements
a) Autopilot board names max length increased to 23 characters (was 13)
b) CAN actuators can report PWM equivalent values (eases debugging)
c) Log download speed improved for boards with “block” backends
d) Notch filter slew limit reduces chance of notch freq moving incorrectly
e) SLCAN disabled when vehicle is armed to reduce CPU load
Bug fixes
a) DO_JUMP mission command fixed if active command changed before changing to Auto mode
b) EKF3 altitude error fix when using dual GPSs and affinity enabled
c) FFT indexing bug fixed
d) Gimbal mount fix to default mode (see MNTx_DEFLT_MODE parameter)
e) MSP fix to report arm status to DJI FPV goggles
f) Notch fix for non-throttle notch (was being incorrectly disabled)
g) OSD fixes for params, font and resolution
h) RPM reporting from harmonic notch fixed
i) “Sending unknown message (50)” warning removed
j) SBF/GSOF/NOVA GPS auto detction of baud rate fixed
k) VideoTX fixes for buffer overruns and Tramp video transmitter support
@hwurzburg and I did some rover testing today with a NMEA GPS (BliCube) and got an internal error:
AP: PreArm: Internal errors 0x100000 l:238 flow_of_ctrl
It comes from this code:
// convert origin and destination to offset from EKF origin
Vector2f origin_NE;
Vector2f destination_NE;
if (!_origin.get_vector_xy_from_origin_NE(origin_NE) ||
!_destination.get_vector_xy_from_origin_NE(destination_NE)) {
INTERNAL_ERROR(AP_InternalError::error_t::flow_of_control);
return false;
}
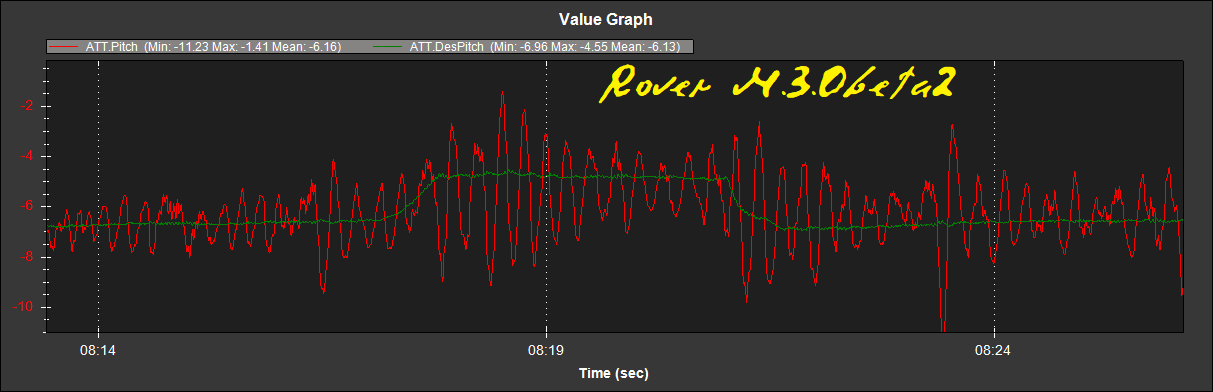
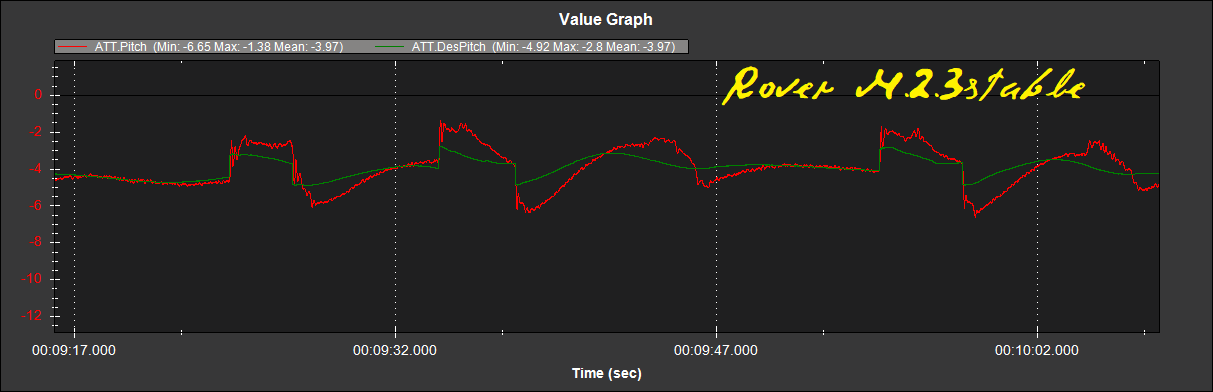
For balance bot, after adapting parameters as described here, I cannot stop tilt vibration with Rover v4.3’s (discussion), so by now I prefer v4.2.3. What else can I try?
I used the X7+controller to download the 4.3-beta2 firmware, which was used on a small boat with pivots rotating, servo=73, servo2=74, and found several problems.
Modify parameter STICK_ MIXING=1. If the boat is in Auto mode, it can only control the accelerator, but cannot control the direction. Is this normal?
Another problem is that when the boat turns or turns in Auto mode, the course of the boat will exceed the direction of the next waypoint each time. The following parameters have been modified, but the effect is still not satisfactory. ATC_ STR_ ACC_ MAX=60,ATC_ STR_ RAT_ MAX=60,ATC_ ACCEL_ MAX=0.4,ATC_ TURN_ MAX_ G=0.2,FRAME_ CLASS=2。 I found that the parameter WP_ PIVOT_ RATE has a very obvious effect on limiting the rotation speed of the ship. It can make the ship rotate slowly. Is it my parameter setting problem?
When the small boat is sailing along the set straight line in Auto mode, and there is a problem of left and right swing, set the following parameters ATC_ STR_ RAT_ FF=3,ATC_ STR_ ANG_ P=0.5, the situation has improved, continue to increase ATC_ STR_ RAT_ FF value, on the contrary, the situation is worse and improved after decreasing. Finally, increase this parameter NAVL1_ PERIOD=70, the boat will not swing significantly.
I want to confirm whether these problems are caused by parameter settings, and if so, how can I modify them.
Thanks for testing. Re tuning advice, could you provide an onboard log? It’s very difficult to provide good advice without a log which includes the details of how the vehicle is performing.
@rmackay9
Please consult the firmware version 4.3, how to set the parameters so that the ship can navigate autonomously? Before 4.3, NAVL1 can be increased_ How can I adjust the left and right swing of the ship when the PERIOD parameter is removed?
Thank you very much for your reply, the community has not updated the new MP software and firmware version 4.3 yet, looking forward to the follow-up update. I will not upload logs in the community. I will send you the log files that will be tested in the future, and will attach the corresponding questions.
@rmackay9 To help others like me who prefer pivot turns for their rover missions, you might want to add a statement on the s-curves tuning page that pivot turns are still accessible in 4.3 (using WP_PIVOT_ANGLE). and that setting WP_PIVOT_ANGLE to 1 degree causes the autopilot to make a pivot turn at all but the perfectly straight waypoints. Or some such.