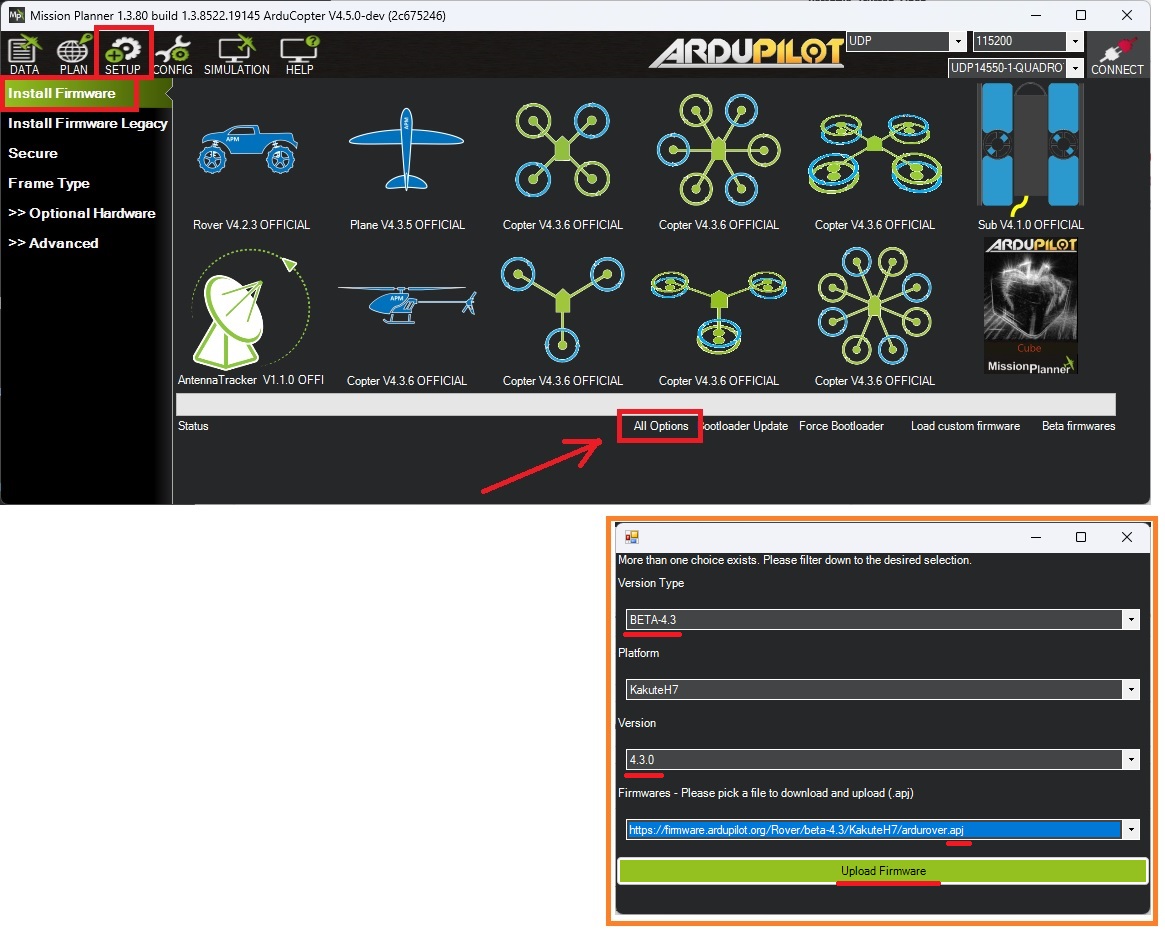
Rover-4.3.0-beta13 has been released for beta testing and can be installed using MP’s firmware install screen’s All Options box or it can be manually downloaded from firmware.ardupilot.org.
MP’s All Options feature must be used because we are also running the 4.4.0 beta release. Below is a screen shot of how to use MP’s All Options feature to get the 4.3.7-beta1.
Changes vs 4.3.6 are in the ReleaseNotes and copied below.
- Bug fixes
a) EKF3 accel bias calculations bug fix
b) EKF3 accel bias process noise adjusted for greater robustness
c) GSF yaw numerical stability fix caused by compassmot
d) INS batch sampler fix to avoid watchdog if INS_LOG_BAT_CNT changed without rebooting
e) Memory corruption bug in the STM32H757 (very rare)
f) RC input on IOMCU bug fix (RC might not be regained if lost)
The most serious issue is the last item. We have found that in some very rare cases, if the RC signal is lost (i.e. RC failsafe) but later restored, ArduPilot is unable to read the signals from the receiver and thus does not recover from the RC failsafe. This can affect any board with an IOMCU which includes most higher end boards like the CubeOrange, Durandal and many others.
Thanks very much for any testing and feedback!