Rover-4.2.3 has been released as the official/stable version for Rovers and Boats and can be installed from the various ground stations (MP, QGC, etc) or downloaded directly from firmware.ardupilot.org.
Changes vs 4.2.2 are in the release-notes and copied below
OpenDroneId support (aka RemoteID)
Firmware ID and CRC check (disabled by default)
New autopilot support
a) CubeOrange+
b) Foxeer Reaper F745
c) MFE PixSurveyA1
d) Pixhawk6C and Pixhawk6X
Bug Fixes and minor enhancements
a) Battery monitor health check fixed to check all enabled monitors
b) ICE Lutan EFI update serial flood fixed
c) ICM42xxx IMU filter settings improved and allow for faster sample rates
d) INA2xx batteries may init after startup
e) KakuteH7 OSD parameter menu enabled
f) Lua script support to set desired speed in Auto mode
g) PreArm check of Rangefinder pin conflict and servo outputs
h) WSL2 upload fixed (developer issue only)
i) BlueRobotics Navigator autopilot filesystem fix
Thanks again to our beta testers for helping us during the beta testing period
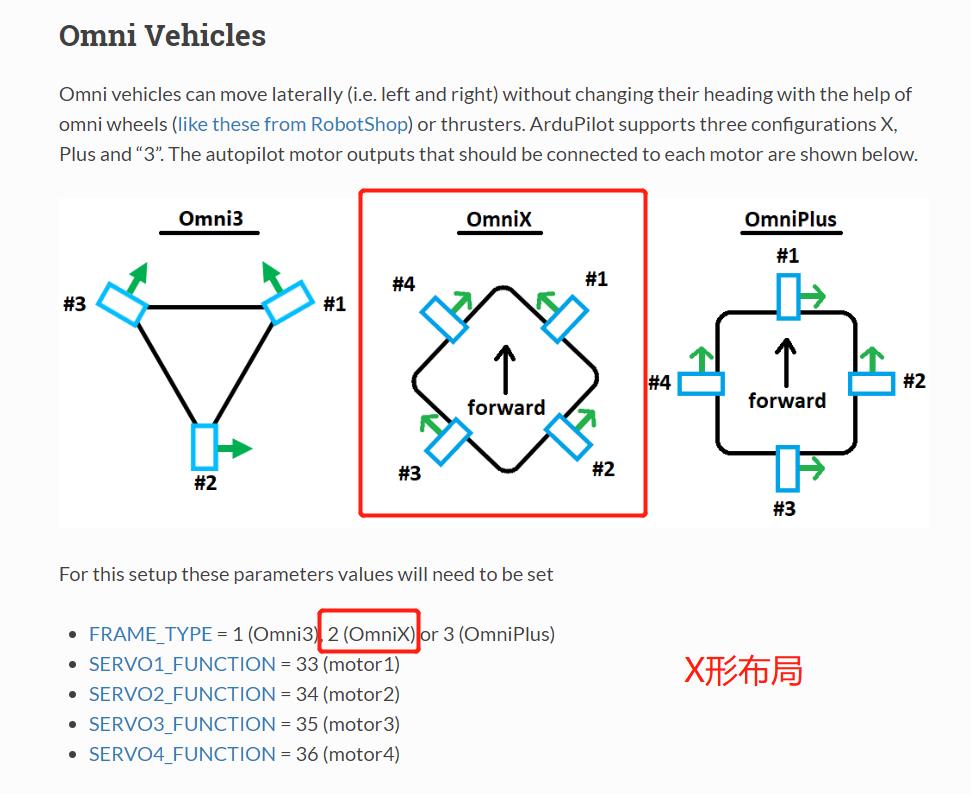
Hi, I have a question to ask I use Rover 4.2.2 and 4.2.3 firmware, set the parameters according to the instructions of the community, and install the motor direction according to the instructions, so that the boat has the function of panning. The following parameters are set: FRAME_TYPE=2,SERVO1—SERVO4_FUNCTION=33,34,35,36. In MANUAL mode, the boat is controlled by the remote control to move forward and backward, turn left and turn right, pan to the left, and pan to the right normally, all of which will use the pivot to run. Plan a straight line, manually adjust the boat to face the first waypoint, switch the Auto mode, the boat can sail automatically, and the heading effect is satisfactory. During the auto sailing process, I found a problem, if the direction of the boat is not facing the next waypoint, switch the Auto mode, the boat will not pivot in place to adjust the direction to go to the first waypoint, it will be faster When turning around with a large radius or leaning to the next waypoint, I set the WP_PIVOT_ANGLE parameter and reduced it from the default 60 degrees to 10 degrees, and the problem has not been solved. After the panning function is turned off, the boat sails normally. How should this problem be solved?