Rover-4.2.1-rc1 has been released for beta testing and should be available for download within a few hours of this post.
The changes vs 4.2.0 are in the release-notes and copied below.
CAN ESCs bus bandwidth efficiency improvements (see CAN_Dx_UC_ESC_OF parameter)
DShot timing improvements to support for ESC variants
Luftan EFI measures fuel consumption (see EFI_COEF1, EFI_COEF2)
Bug fixes
b) CAN ESCs work on boards with no safety switch (e.g. MatekH743)
b) Inflight Compass calibration checks GSF yaw estimate is good
c) NeoPixel colour fix
The changes fixup a few things that came up at the end of beta testing but weren’t critical enough to block the stable release.
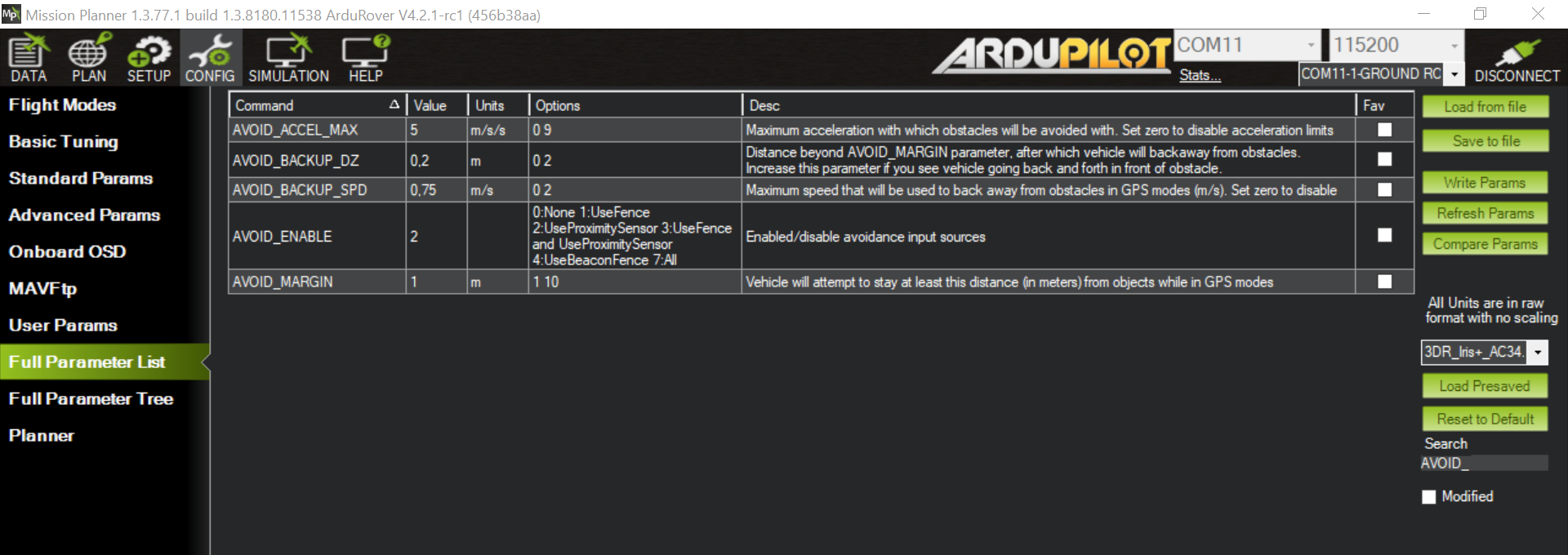
I tried the 4.2.1 rover on FC omnibus F4 pro (1MB) with fw generated by custom firmware server. Despite the fact of having generated a FW with the proximity libraries, the benewake TF luna lidar works (sonar range is ok), not even the simple stop works. These are the avoidance parameters I have on my FW. Thank you!
Thanks Randy for what you can do!
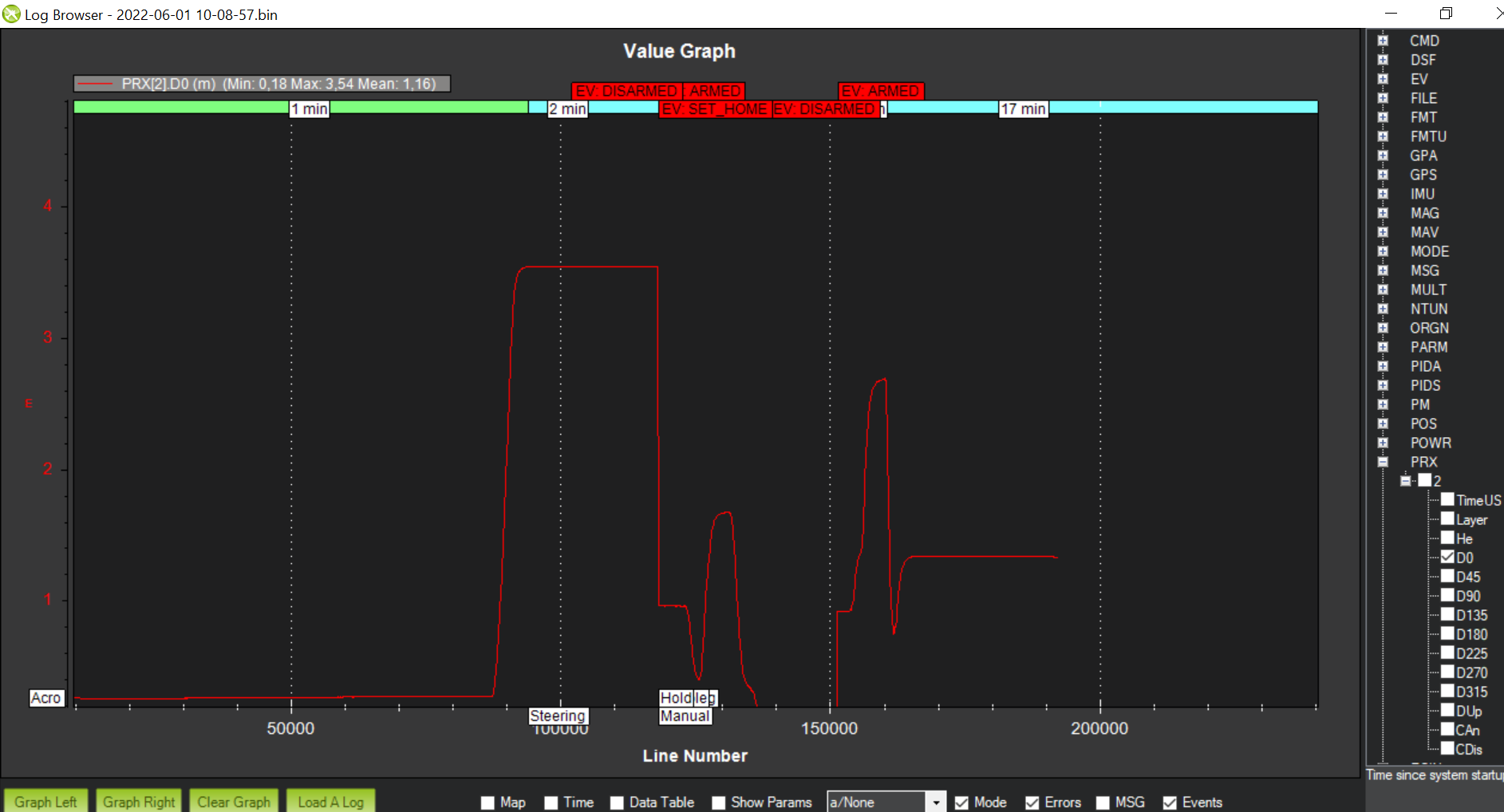
I believe the PRX messages arrive. I attach the link with the complete log.
Small, low-cost rovers can also be very useful in teaching!
@Alberto_Ds I see that you have proximity avoidance configured on an RC channel. Do you flip that switch “high” before testing?
On your console it should say: “AvoidProximity High” or something like that
hello everyone and sorry for the late reply but in Italy it was a national holiday. I actually had proximity activation on an RC channel (probable old test of the many performed). I have removed this setting and, finally, the rover stops and backs away in front of obstacles! However, I noticed this behavior ONLY outdoors with GPS coverage. Possible?
Is the behavior normal?
indoor the rover ignores obstacles and bumps into them despite the perfect distance reading I see in the mission planner (sonar range).
Also I was looking to evolve using BendyRuler. By quickly checking the parameters,
I have set OA_TYPE = 1. I will do further tests. Can I use Simple Avoidance and BendyRuler together on the same Rover?
Thank you very much !!
Yes, all the avoidance features requires a position estimate (e.g. GPS, wheel encoders, etc).
The reason is that knowing the distance to an obstacle is not sufficient in order to stop in time. We also need to know how quickly the vehicle is moving towards that obstacle. Our proximity and rangefinder libraries really only provide a distance to an obstacle so we assume that the obstacles are stationary and use the vehicle’s velocity as an estimate of how quickly we are approaching the obstacle… knowing the vehicle’s velocity requires a position estimate (GPS, wheelencoder, etc).