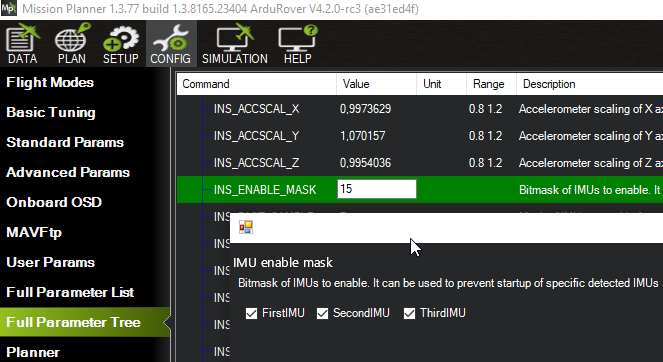
on Matek H743 I had to change INS_ENABLE_MASK manually to 15 to enable the 4th IMU.
Otherwise second IMU1 (MPU6000) is not detected.
It is a board with ICM_20602.
Same for Rover and Copter.
Thanks for the report. I’ve added it to the 4.2 issues list and we will run over it at tomorrow’s dev call and hopefully update the INS_ENABLE_MASK param description.
The parameter description has been corrected in master (aka “latest”) so this fix will go out with the next beta release. That might actually be 4.2.1 but in any case… it’s on the way.