I’m revisiting a 4.2.0-dev upgrade this week and I’m so far stuck for solutions regarding proper GPIO behavior on the Cube Orange at boot time.
@rmackay9’s previous reply included:
We think if you set SERVOx_FUNCTION = -1 (GPIO) for the relevant channels then you’ll be back to the old behaviour.
Following Randy’s advice, I was able to get close to “normal” behavior, but it’s still not behaving well.
My original relay board was active low. With it, under 4.2.0-dev, all of the relays were briefly triggered at boot for about 2 seconds until the transmitter was able to command them to their proper off state. Worse, if the transmitter was off/out of range, the relays stayed engaged.
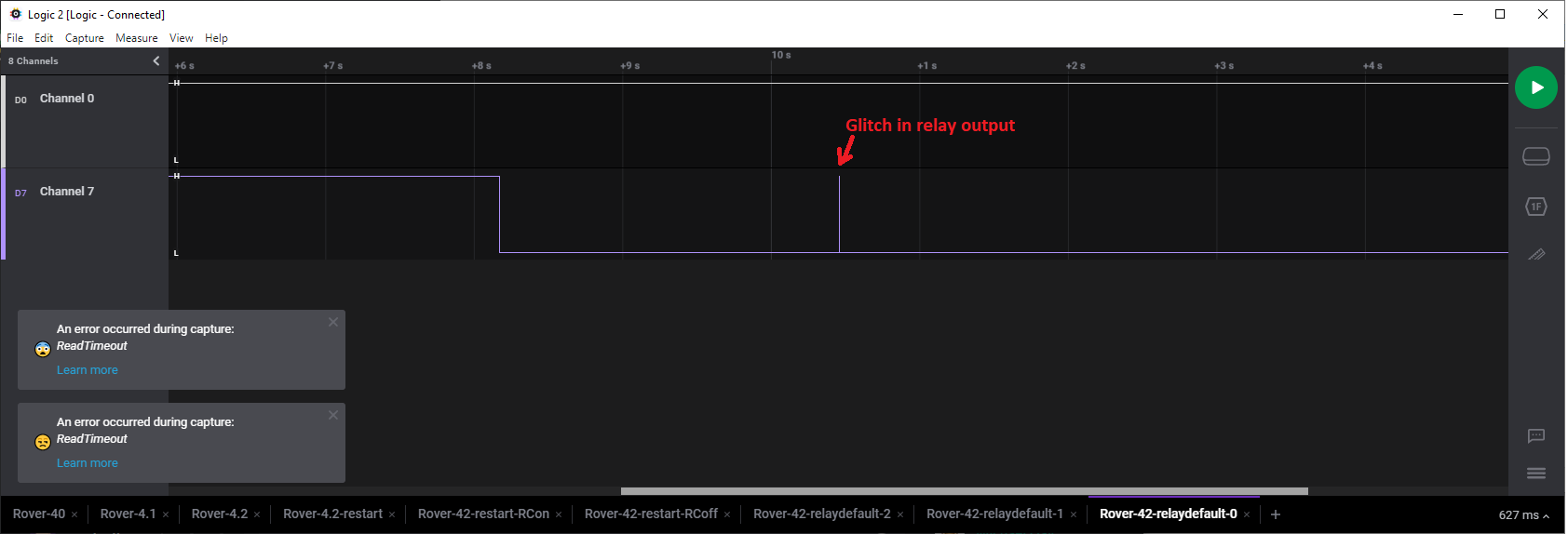
I was never happy with the active low relay board, so I took this opportunity to replace it with a better quality board that has proper active high inputs. The new board’s behavior is WORSE! After checking and double checking that I’ve reversed the settings used for the previous board, upon boot, the relays are all triggered for about 2 seconds, then flicker twice before finally switching off as intended. Thankfully they stay off at that point, regardless of transmitter state.
Under previous firmware, I think I solved this by setting the RELAY_DEFAULT parameter, but it has no effect with 4.2 (or I am mistaken about its purpose).
As of this moment, the only way to safely boot my flight controller is to disconnect the power connector on the relay board until the boot sequence is complete. If I do not take that precaution, the ignition, starter, PTO (mower blades!), and driving lights all trigger immediately and repeatedly upon power up, which is incredibly unsafe.
I’m happy to provide parameter files or logs if you think they will be helpful. I hope I’m just missing a simple setting in the parameters.
Additionally, after the 4.2 firmware flash, RELAY_PIN2 was set to -1 rather than saving my 4.1.0 setting of pin 55. The other relay pin settings were unaffected.
This particular topic is probably best discussed in a Rover 4.2 category, but I guess I’m a little ahead of the forum for that…