hello, what version will be bdshot for matek f765-wing? I know about a lot of peripherals and few free processor pins, but still?
That’s it! Like night and day; thanks a lot. Now v4.2beta3 works in Manual, Acro and Hold very well (I’ll try Auto shortly), with no more “Relay1 pin 50 invalid” messages.
BTW1, as far as I know FC common general purpose I/O pins can be:
- Output:
- PWM with servo timing (servos, conventional ESC’s…)
- PWM duty cycle (DC motors)
- On/off signals (direction control, relays…)
- Input (encoders, rpm).
- Bidirectional (bdshot)
but not every pin can be anything, IOMCU pins can have more restrictions, and signals may be grouped.
Somewhere describing how those pin functions relate to parameters would be convenient.
BTW2, from always for Rover:
- ACRO_TURN_RATE controls how the pilot’s input is converted to a desired turn rate in Acro mode. This parameter can be reduced to make turns in Acro mode more docile for the driver
- ATC_STR_RAT_MAX is the maximum turn rate that the vehicle will ever attempt in any mode. This should normally be kept close to the vehicle’s performance limits so the vehicle remains agile
ACRO_TURN_RATE works in a balance bot in Acro, but in Manual I find steering always fast no matter how low I set ATC_STR_RAT_MAX. What can I try?
1 Like
On a simple encoders test at home, I cannot see WENC messages at all on a .bin file.
Examining what happened in v4.00 this is obtained from a .bin file one day before (balance bot going back and forth in Auto):
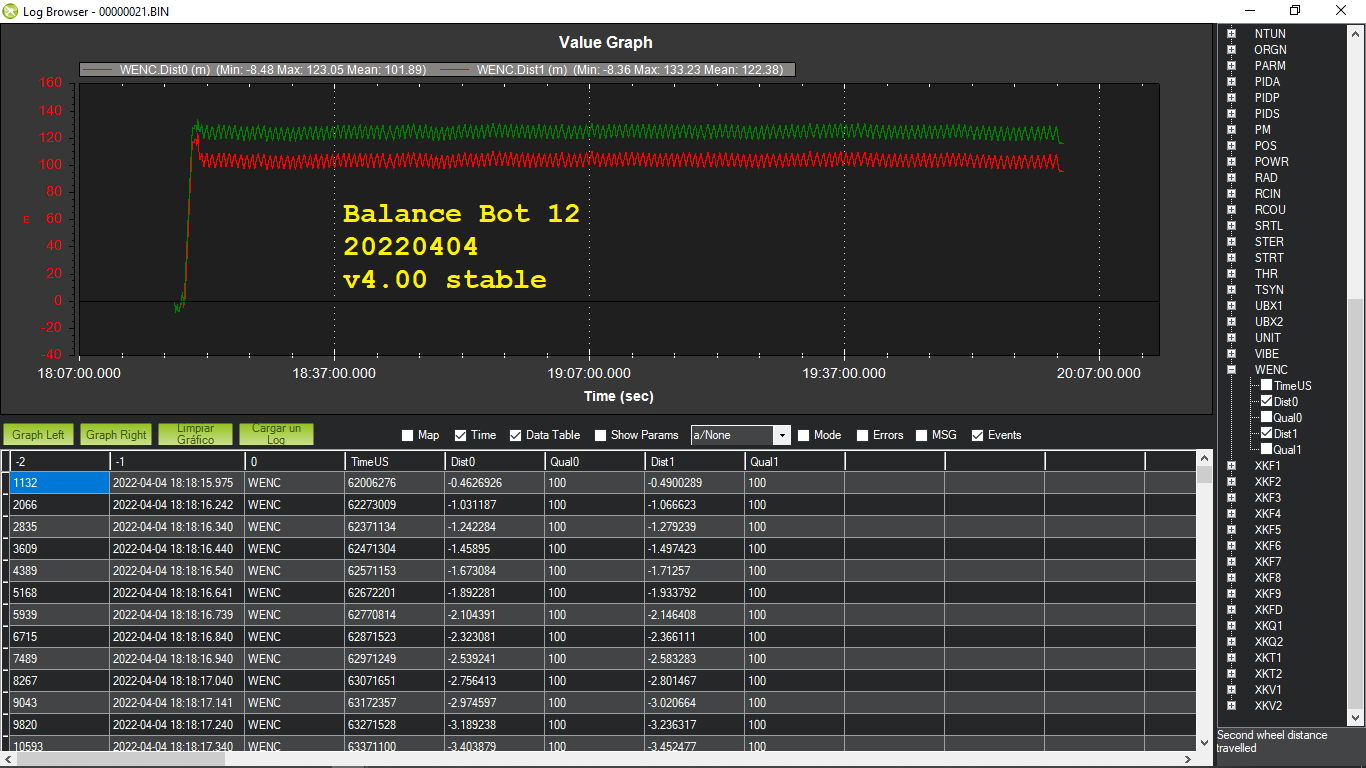
WENC distances and WENC messages.
It looks like we don’t have a -bdshot version for the MatekF765-wing (see here) and it is not listged as one of the boards that support it using the default firmware (see list here on the wiki)
@andyp1per should we add a -bdshot version for this board?
1 Like
That Matek board is EOL…
1 Like
Great news that the balance bot is mostly working.
I think the wheel encoder issue is very similar and that you will need to set:
- SERVO11_FUNCTION = -1
- SERVO12_FUNCTION = -1
- SERVO13_FUNCTION = -1
- SERVO14_FUNCTION = -1
Yes! I created a topic where a person promised to do this but apparently busy.
Please note that I found it impossible to prevent DMA sharing with I2C1. I don’t know whether this will impact performance or not but needs testing.
Thanks, I’ll be sure to test
That’s it! Thanks a lot.
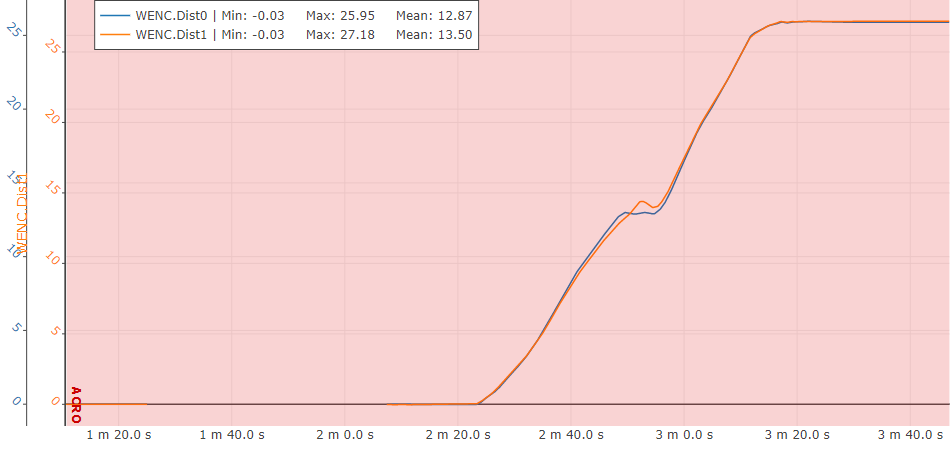
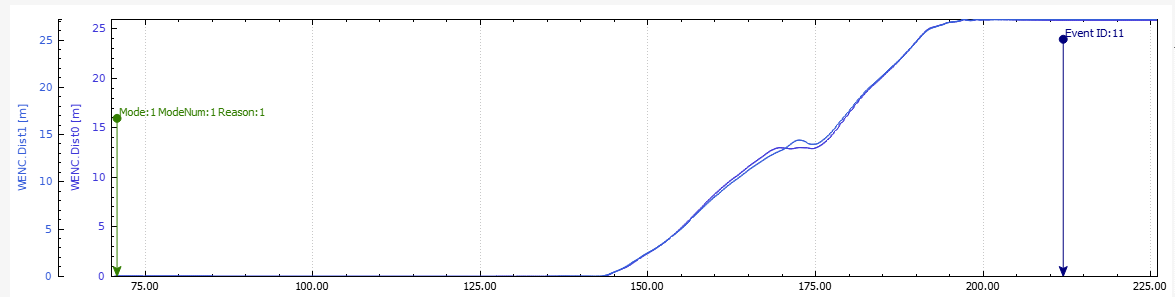
This is the result of a home test, moreless 12m straight, turn left 180º and return:
http://plot.ardupilot.org and APM Planner 2 can read the .bin log, but MP fails:

Then it keeps scanning forever. See this.
1 Like
I don’t understand how to make the firmware using this link, can you help me again
You would need to build it yourself. Is it rover you are after?
I tried but did not understand how, I need a quadrocopter
thanks a lot !!! working!!! I’m waiting for field tests, I’ll write about the result
1 Like
Here is a test in Auto:

The one far from camera (MP male voice) is more recent and has not yet a good setup.
The router I normally use refused to work so I had to use a mobile phone for wifi and Internet. This may explain many errors heard and, although both have RTK GPS and should follow two parallel straight lines, the result is not too good (many trees around don’t help (GPS shadowing)).
1 Like
MichaelO has fixed the MP dataflash log parsing issue in the latest beta. I’ve just tested it with your log and it’s able to process it now. Txs for the report!
Hello. Thank you very much! the firmware works, I had to adjust the pid, but the quadcopter flies fine, the engine speed data is displayed, the rpm filter works, there will be more time to do more tests. flew in windy weather up to 12 meters per second, was able to disperse the copter up to 25 meters per second!!! this is on a 650 frame downwind of course, I didn’t notice oddities
Wow great. That is really quick.