Rover-4.1.3 has just been released as the official version for cars and boats. The changes vs 4.1.2 are in the release-notes and copied below:
Enhancements
a) CUAV-X7 servo voltage detection support
b) Support for IIM-42652, ICM-40605 and ICM-20608-D IMUs
Bug fixes
a) Debug pins disabled by default to prevent rare inflight reset due to electrostatic discharge
b) EKF3 reset causing bad accel biases fixed (never reported on a user vehicle)
c) Main loop delay fix for boards with 16 bit timers (affects KakuteF4, MatekH743, MatekF405, MatekF765, SpeedybeeF4)
d) Polygon Fence upload fix when replacing fence with one that has fewer points
e) RC protocol detection fix that forced PH4-mini users to powerup autopilot before transmitter
f) SmartAudio high CPU load fix (previously it could starve other threads of CPU)
In general these are pretty minor fixes but perhaps 2e is the most likely to affect users. It could cause of SBUS receivers to only work if the transmitter was switched on after the autopilot which was annoying.
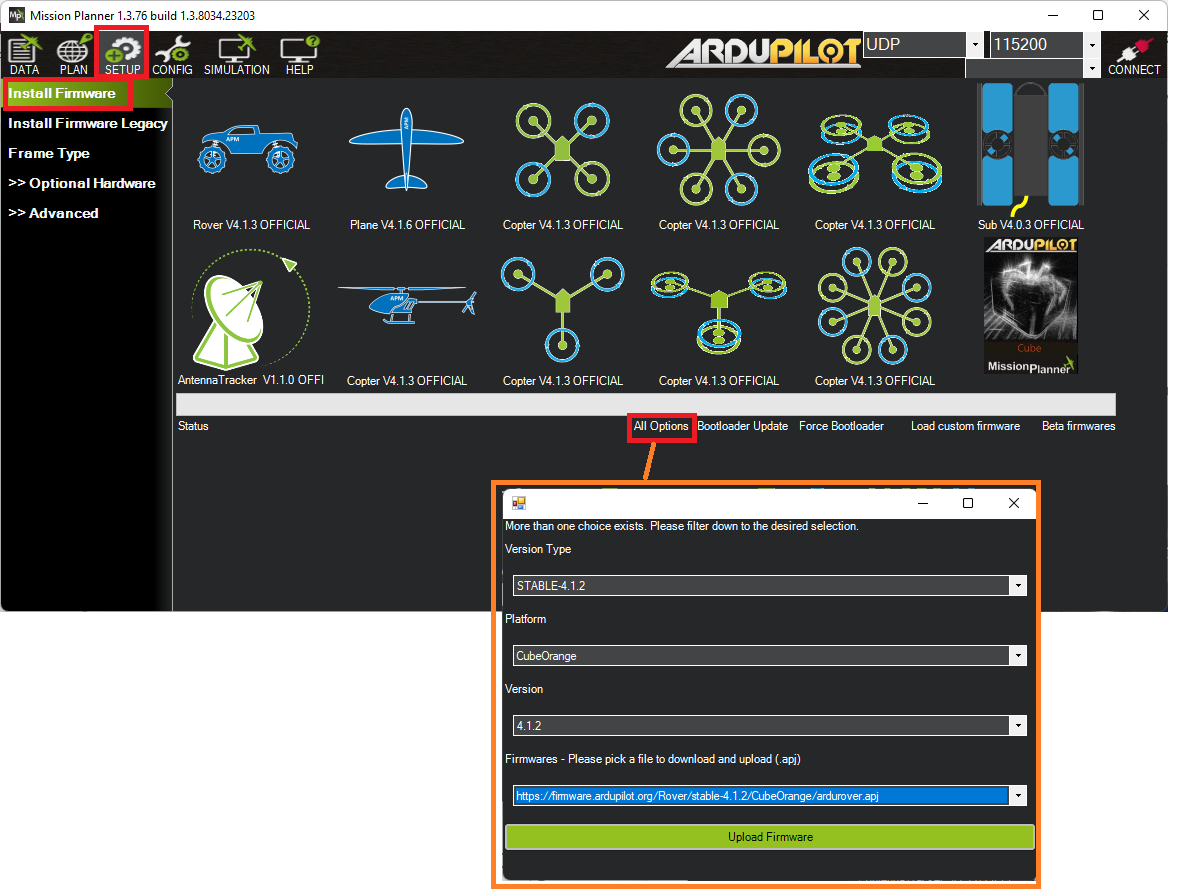
Thanks for the report. Is this a new vehicle or did it work with an earlier 4.1.x release? By the way, you can go back to 4.1.2 using MP’s Install Firmware screen’s “All Options” button and then select the version, autopilot and frame. For example, this is what I would select to load Rover-4.1.2 for a CubeOrange.
I just check using my own AION robotics skid-steering rover and 4.1.3 seems to work so this means that the issue is not a general problem and we need to narrow down a bit more.
Providing an onboard log will give me a lot of information to help narrow down on the issue including which autopilot is being used, the protocol being used to control the ESCs, etc.
If the vehicle can’t be armed then setting LOG_DISARMED = 1 will produce a log even if the vehicle is disarmed. If you haven’t downloaded logs before then there are two methods described on this wiki page:
plug a USB cable into the autopilot and download using MP’s Data page’s Data Logs tab’s “Download DataFlash Log via MAVLink” button
pull the SD card from the autopilot, insert it into your PC (maybe an adapter is required), pull out the last log from the APM/Logs directory.