Rover-4.1.2 has been released as the stable version and can be downloaded using MP, QGC or directly from firmware.ardupilot.org.
The changes vs Rover-4.1.1 are in the release notes and copied below.
Changes from 4.1.1
CAN_Dn_UC_OPTION param added to help resolve DroneCAN DNA conflicts
Durandal with alternative ICM-20602 IMU
OBAL autopilot support (Open Board Architecture for Linux)
FETtec One ESC protocol support
Bug Fixes
a) APM/LOGS directory creation fixed on some boards
b) EKF3 fix to switch to non-zero primary core when disarmed
This release is consistent with the latest Copter and Plane release so we are fairly confident that it should all be fine but please tell us if you see any issues. Thanks!
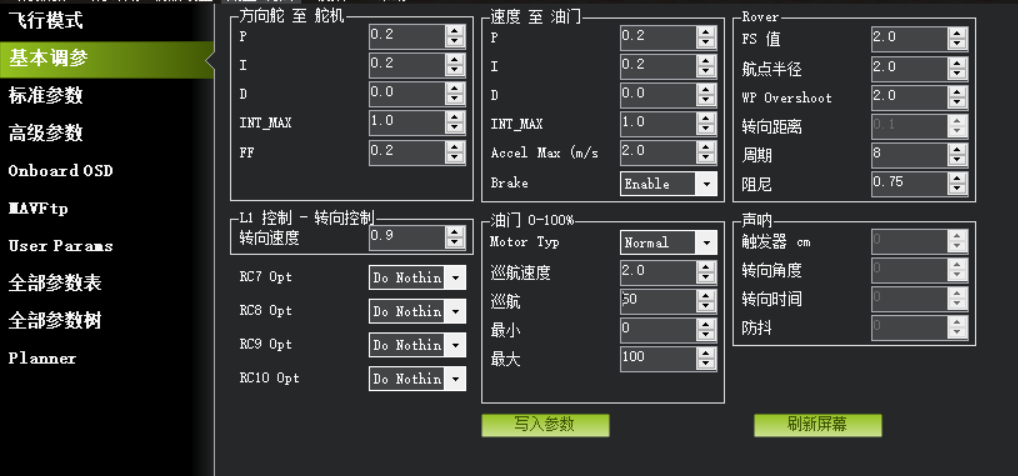
thank you for your reply The logging card is installed, what data need to be recorded? I should follow those operations on the wiki, and please give me some guidance. I would be very grateful. What are the specific parameters for turning rate and pivot control? How should it be adjusted? My boat is 1.3m long, 0.45m wide, and 0.3m high. It uses a differential jet pump propeller. CUAV v5nano flight control, 4.1.2 car firmware
First of all thank you for your reply.
In version 4.1.2, I use dual antenna direction finding and positioning functions. The positioning is already fixed and the direction is no problem, but EKF pos_horiz_abs off is red, and it prompts fault protection after disarming. The same setting 4.0 version does not report an error.