Hello everyone,
I am trying to use 2 external here3 gps for my rover. But when i plug them to can1 and can2 ports only one of them has seen by cube orange. I’ve tried in Hold and Manuel modes. Can you help me with my problem ? Here is my parameters:
The parameters generally look OK. The only thing I question is these two params.
CAN_P1_DRIVER,1
CAN_P2_DRIVER,1
This means that both CAN ports are essentially connected. You could try changing CAN_P2_DRIVER=2 but it shouldn’t matter.
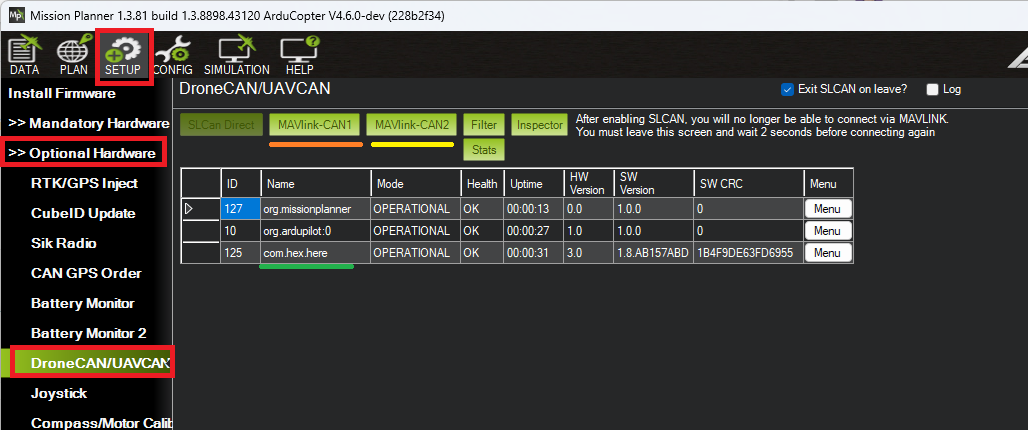
The next thing I’d do is see if both GPSs appear to MP’s DroneCAN page. So below is what I see for my CubeRed that has a single GPS cojnnected to CAN1.
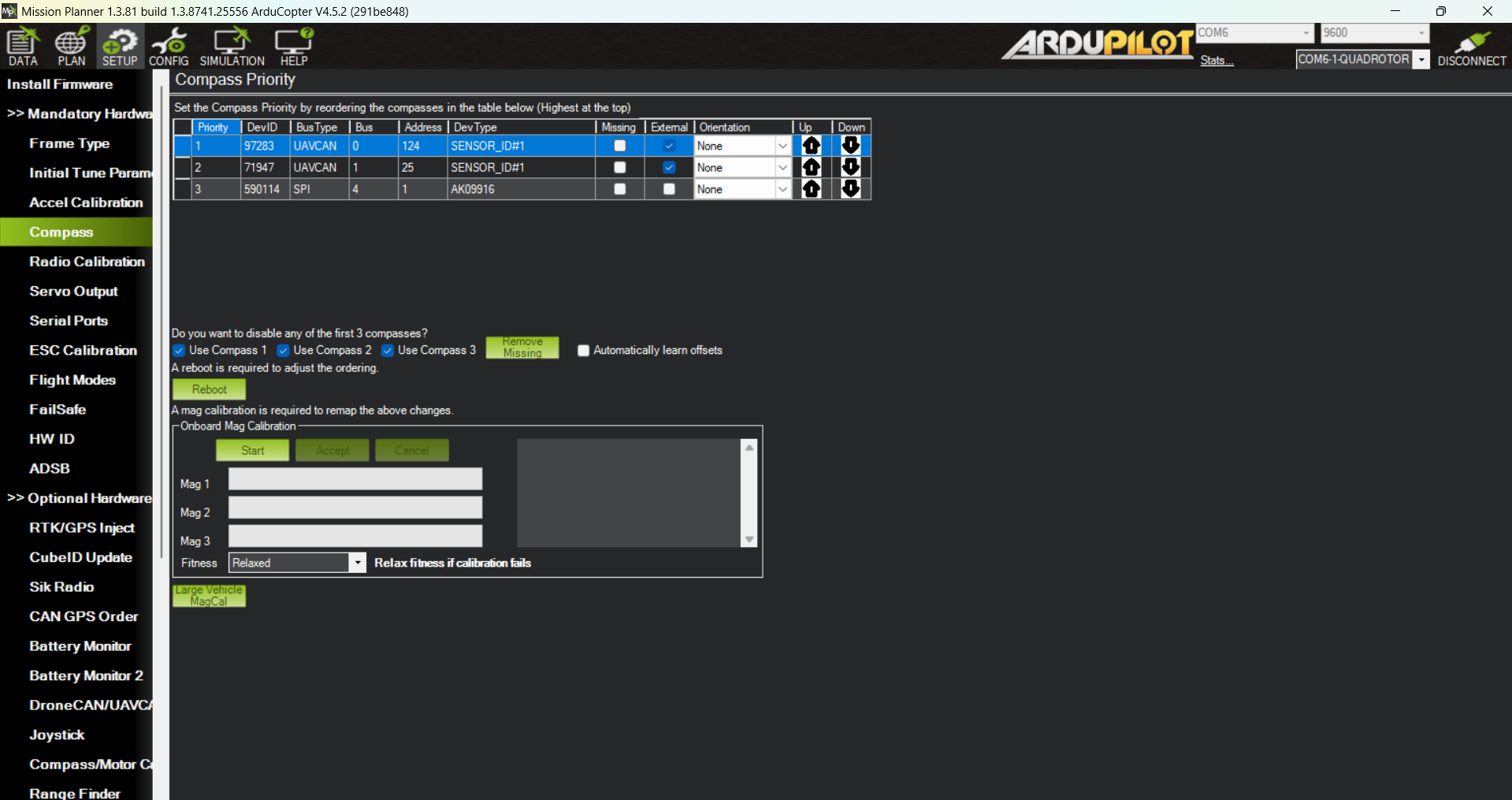
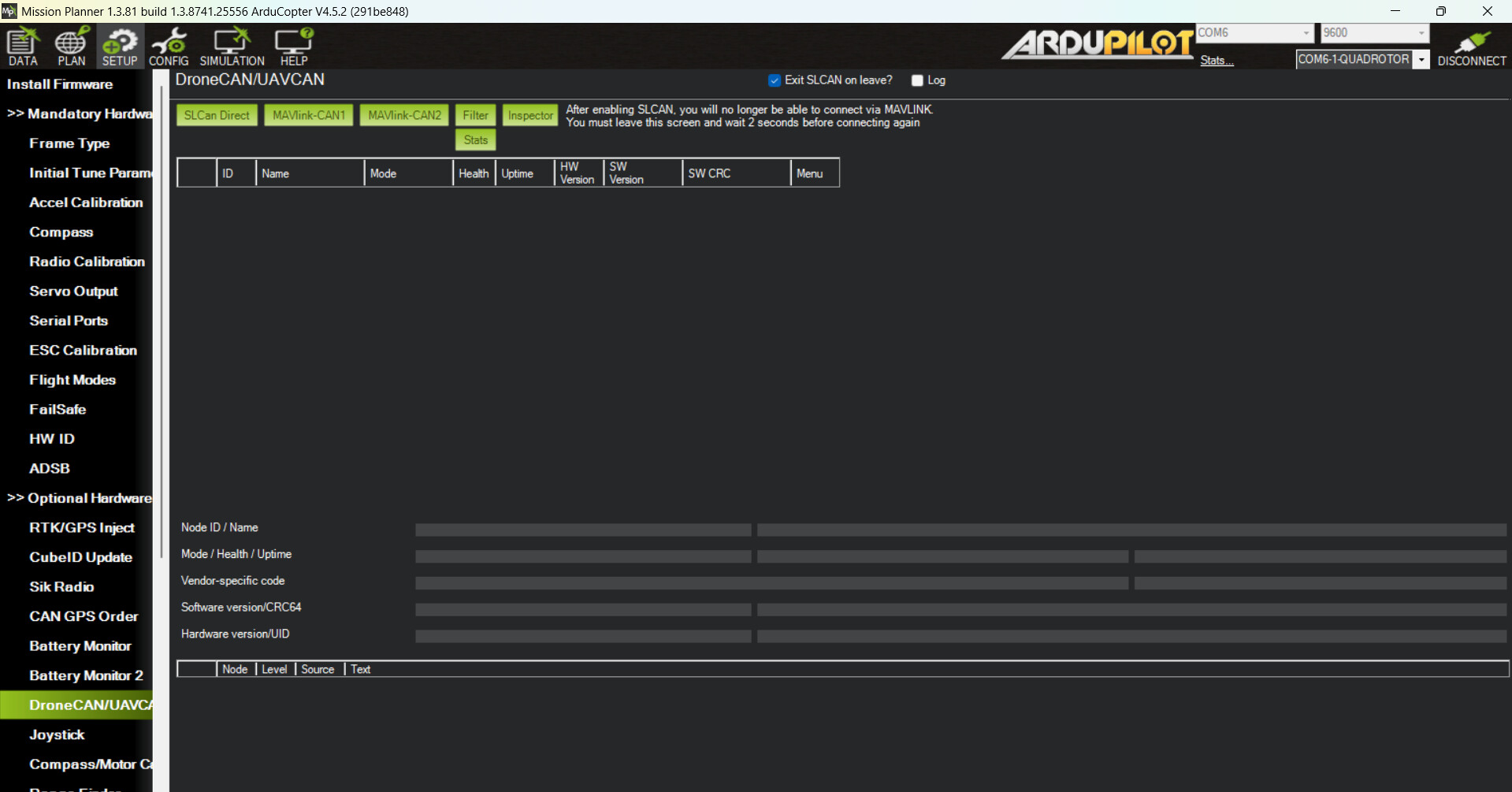
I changed the parameter can_p2_driver=2 and now i can see 3 gps on mandatory hardware>compass page but i can’t see any gps on optional hardware>DroneCan/UAVCAN
What if i want 2 GPS’s with the uart communication protocol ? Is it possible with the right parameters, through gps1 and gps2 ports for rover? Or can i use can communication with 2 GPS’s for rover and drone ? And when i use dual gps, can the data from two gps can appear seperately ?