Hi,
I have a DOIT TS100 tank with differential steer. It has two 12v 180 rpm motors with encoders. The encoders are 300 PPR, and the gear reduction is 75:1.
I’ve connected as the guide on the ardupilot site shows. After I have rebooted the system, I tried to debug the configuration with mavlink inspector. There, no WHEEL_DISTANCE is available, while on the Mission Planner status tab rpm1 and rpm2 show 0.
{kind=link}
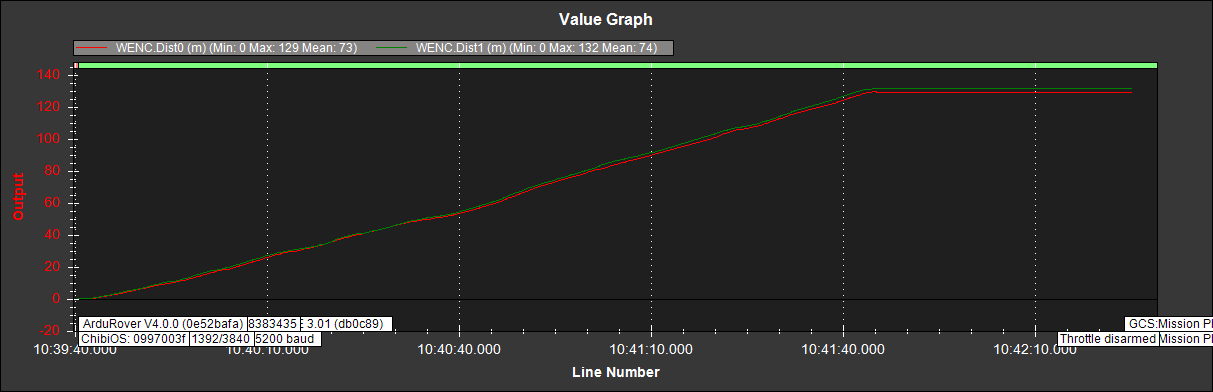
What helped me most was getting the WENC distances as in above figure, and having the total distances shown be the same as in an actual test (129/132m as shown). The red trace is for the inner wheel in a circuit lap with known length.