Hello everyone, I am testing the GNSS dual antenna on the ardurover to replace the magnetic compass. I set the parameters EKF_TYPE = 3, EKF2_ENABLE = 0, EKF3_ENABLE = 1, EKF3_MAG_CAL = 5, run EKF3, but my GCS loses packets too much, the connection quality is only 10%, I changed to EKF2 and everything is OK, the same hardware. . . Why is this? Below are the log files of ekf3. Thank you. I am running ardupilot under linuxRT on am335x processors.
Thanks for the report. I’ve had a quick look at the logs and I don’t see any CPU performance issue (PM message doesn’t show any long loops).
I also had a look at the “MAV” onboard log messages but I’m not any further enlightened on what the issue might be. These are new messages so perhaps @tridge or @peterbarker has a better idea or has some other ideas.
It might be helpful to provide logs of when EKF2 is used so we can look for differences.
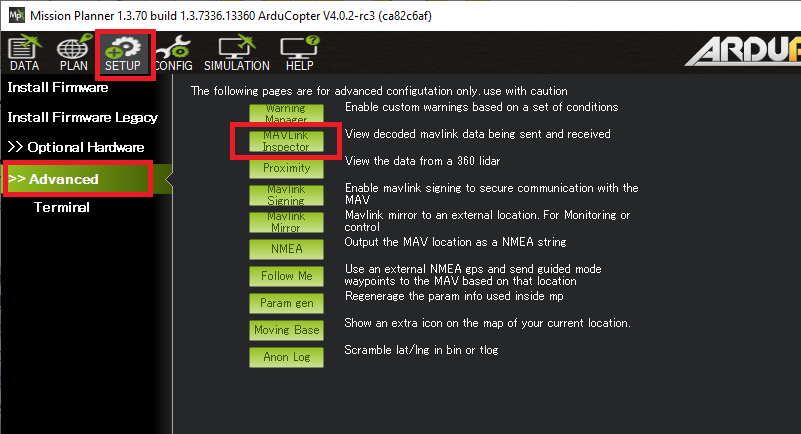
Maybe using MP’s or QGC’s mavlink inspector might also provide some insight into what messages are being sent from the autopilot in the two different situations. If you’re using the latest MP beta the mavlink inspector can be found on the Setup >> Advanced page.