Randy. Tried that buddy and also physically disconnected. Still showing bad lidar on HUD and doing circles.
This may be the issue. I have reverted back to rover 3.5.2 as it works. Will updating the firmware bring me much improvement in regards to the way the rover is? I mean as the saying goes if it’s not broke don’t fix it. What would I be missing out on without rover 4.0?
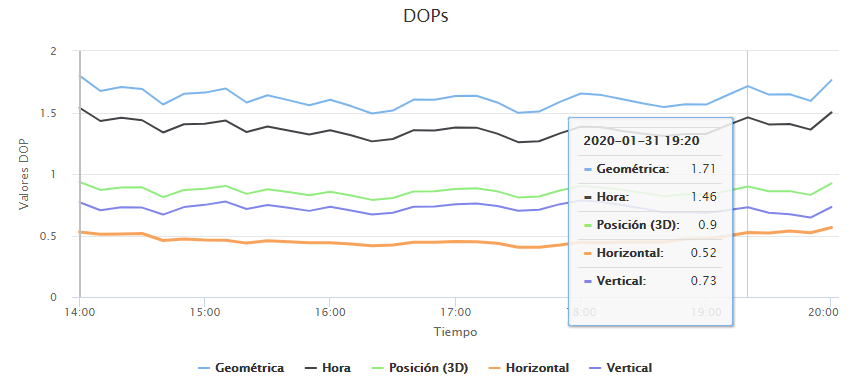
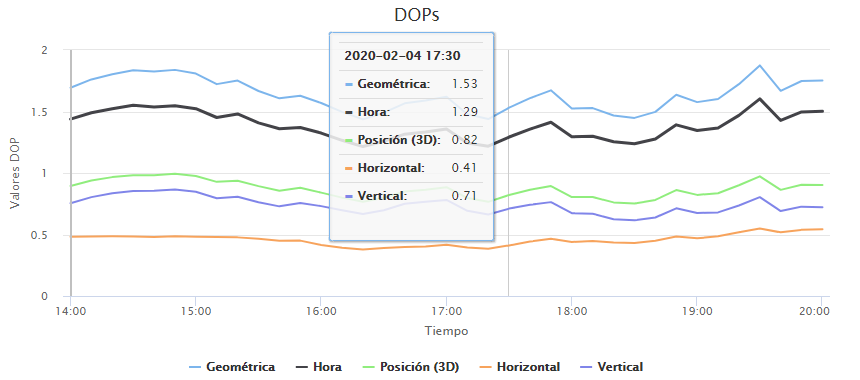
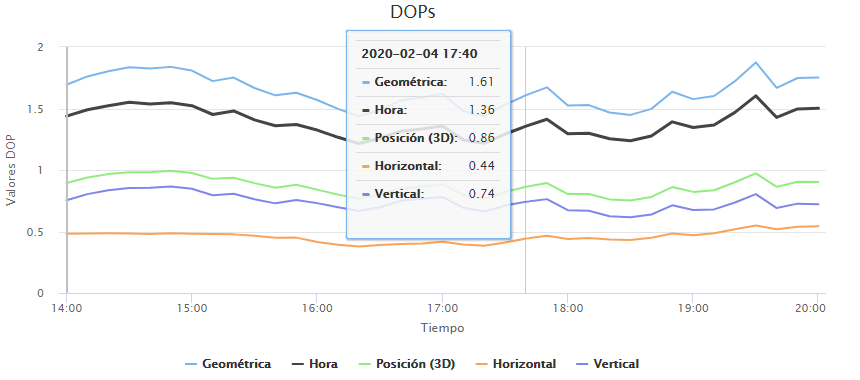
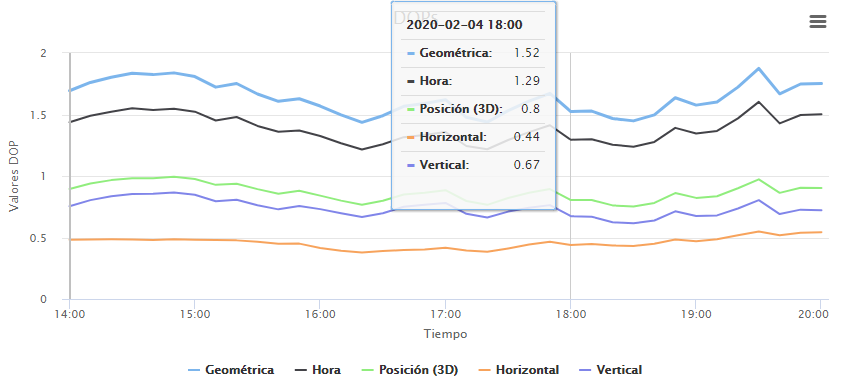
Four Balance Bot 4K videos with working RTK, with the open sky HDOP’s (since the circuit is surrounded by trees there is a lot of GPS shadowing)
20200131 19:20
20200204 17:30
20200204 17:40
20200204 18:00
1 Like
The release notes are here so it should be possible to have a look at the list (about the first 67 lines) to see if any enhancements or fixes are important for you.
It’s probably best to provide an onboard log file. As we often say, it’s all guesswork without a log.
I suspect that the lidar is actually not related to whatever is going on but I think I’ll need to see a log file…
Hey!
can you re-enable mis_done_behave in rover 4.0? I miss it because there is no feedback at 200m apart from a melody! Auto to hold and RTL to hold was ideal!
For me, the boat stops in Rover 4.0!
But does not change from Auto to Hold.
A melody sounds from the buzzer in the boat.
I do not hear this!
It would be better as before!
Boat moves, stops and changes to Hold, Loiter or RTL.
As before.
If the rover changes to Hold, the woman also pronounces Hold in the APP!
Perfect for long distance feedback!
Because I need the feedback especially at night when I’m fishing I unfortunately use 3.5.2.
But would like to use Rover 4.0!
I think it would be good if Mis_done_behave gave feedback in the MP or QGround control etc. !!!
Would any of these work in your case? (I never tried any).
Mode change is heard, when mission completes.
Dear Randy,
I am currently using Rover 3.5.2 and have tried to recently connect ArduSimple’s SimpleRTK2B but have been unsuccessful in connecting it to Pixhawk 2.1 and Mission Planner to get a GPS Signal.
I have noticed in the new 4.0 Rover Firmware it says “ UBlox F9 GPS automatic configuration”
Does this mean if I update to the new firmware the SimpleRTK2B will work? It uses UBlox ZED-F9P and I don’t think it works with the 3.5.2 firmware I currently have as I have tried many different configurations in mission planner.
Your advice would be greatly appreciated.
Thank you
1 Like
(translated from German)
Hey…
i’m in despair …
i have rover 4.0 and 2 engine Boat.
I try to slow down my boat 2m beforehand so that there are no overcurves but wp_overshoot and atc_deccel_max or atc_accel_max show no effects …
I tested…
WP_RADIUS 0,5m for baiting
Wp_speed 1 m/s
Wp_overshoot 2m (0,5-3)
Atc_deccel_max 0,5 (0,5-3m)
Atc_accel_max 0,5 (0,5-3m)
No matter what it doesn’t respond …
I would like it to be much slower 2m beforehand, turning properly, slowly turning and accelerating again!
In the past, parameter speed_turn_gain and speed_turn_dist were perfect.
Can you help me?
Hi, I work on Rover at sitl and I am a newbie. I wonder that how can i update dronekit-sitl to version4.0.0. The version of the Rover at sitl is 2.5. Updating the sitl for Rover is possible? How i can do this?
Thanks in advance,