Rover-3.3.0-rc1 is available for beta testing using the Mission Planner (and perhaps other GCS’s) beta firmwares link.
Changes vs 3.2.3:
Simple object avoidance support
Circular and polygon fence support
Pivot turn improvements
a) Heading control used to aim at new target
b) ATC_STR_ACC_MAX limits maximum rotational acceleration
c) ATC_STR_RAT_MAX limits maximum rotation rate
Allow ACRO mode without GPS for skid-steering vehicles (reverts to manual throttle)
MOT_THR_MIN used as deadzone
Parameter default changes:
a) PIVOT_TURN_ANGLE default raised from 30 to 60 degrees
b) ATC_STR_RAT_P and I reduced to 0.2
c) ATC_STR_RAT_FILT and ATC_SPEED_FILT reduced from 50hz to 10hz to better match vehicle response time
Boats report themselves as boats allowing ground stations to display boat icon on map
Any testing people can do is greatly appreciated. The Rover wiki will be updated over the next week or two with info on some of these new features and of course we’re here to answer any questions beta testers might have. Thanks!
Tested this a short while ago with Solex and Tower. I haven’t gotten into tuning it much yet. With the settings I have, pivot turns start out at the normal turn rate, then slow until it’s pointed at the next waypoint. This works perfectly when the turns are on pavement or hard surfaces, and almost perfectly in tall grass where there’s resistance.
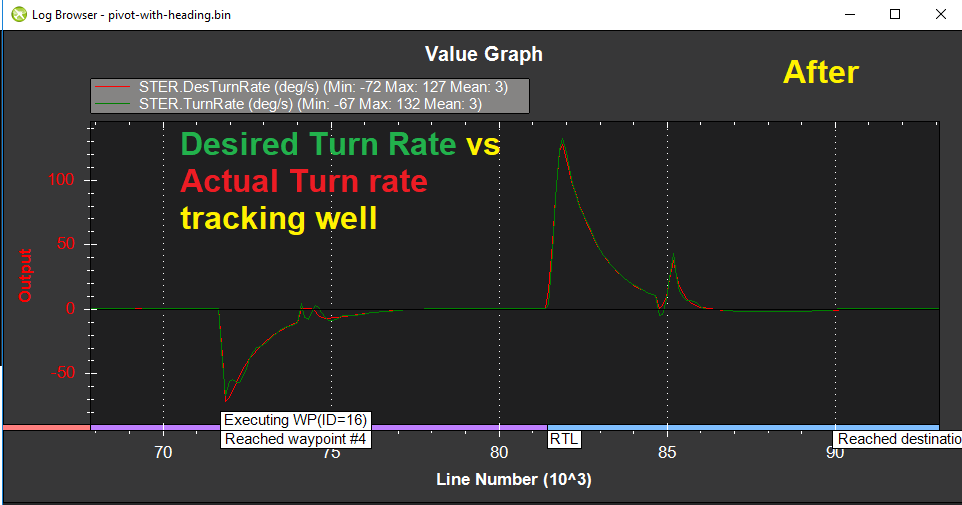
Yes, you can see the response curve on this PR and I’ve copied the shape of the curve below. As you say, it climbs quite rapidly to the ATC_STR_RATE_MAX speed but then it will slow down as it gets close to the target heading. The slope of that curve comes a lot from the ATC_STR_ANG_P parameter. So a lower value will make it slow down more slowly, a higher value will make it maintain the top speed for longer.
The rate at which the rotation rate increases and decreases is limited by the ATC_STR_ACC_MAX parameter (default is 360deg/sec/sec). So if you make this lower it will get to the top rotation speed more slowly. We need to be careful not to set this acceleration too low though or it can lead to really crappy behaviour including overshooting the target massively.
With a bit of thought we can probably make the response curve whatever we want but this was quite easy to do and a significant improvement over the old ham-fisted method.
Perhaps we should increase the ATC_STR_ANG_P from 1 to 2. That should make the pivot turn more aggressive. I also suspect we need a little more ATC_STR_RAT_I to make sure it can overcome the friction but that needs more testing because it can also lead to overshoot.
Did some tuning yesterday on the various params for turning. I’m pretty happy with the way it’s working now, it’s aggressive enough to make a turn in a timely fashion in tall grass (which I left un-mowed for this test), but not so aggressive it overshoots on pavement.
A couple of things to note:
I’m running with the “hood” off while testing with a mast and a couple of WiFi adapters I’m using to get 1000+ foot range.