I have connected an external RPM sensor to the Pixhawk and it’s working, but when I change the H_RSC_MODE=3 nothing is changing, also other modes are not affected.
Also when I set the H_RSC_GOV_SETPNT=1900 the RPM changes from 1900 to 2200 when I move te collective stick and thus isn’t controlled by the internal governor.
@Ojwhaaa_Ojwhaaa you need to set the RSC mode to four for the internal governor. The setting you have currently is just the throttle curve with no internal governor.
Also remember to post in the traditional helicopter section of the forum as that will get the most attention by our helicopter users.
Hi Bill, thanks for the reply.
I tried all possible combinations and also option 4. To be certain I just tried it again with the following settings:
H_RSC_GOV_SETPNT,800
H_RSC_MODE,4
But the RPM remains at around 1940 RPM and responds slightly to throttle input and doesn’t drop to 800RPM as to be expected.
Could it be the problem that I have the throttle at channel 8 HeliRSC? All the Auto functions as RTH and ALTHOLD work fine.
If your RPM is at 1940 on the throttle curve then there is no way this governor will keep it at 800 RPM. Your throttle curve should be set so it keeps the RPM with 100 RPM of the desired setpoint. Especially with the governor in 4.1.5 and earlier. The new one coming out in 4.2 is much more forgiving. You can be off by a couple hundred RPM and it will adjust to hold the desired rotor speed.
In the logs, there is a governor output signal in the Heli message. You can check that to see if the governor is actually outputting to the throttle.
I don’t know if I will have time but post a log. I will also try to look at your param file. What size heli and is it powered with a gas or electric motor?
I think I moved it for you. It was in another part of the forum. I think maybe Copter 4.1. No worries it is in the right place now.
The helicopter is an Electric powered Trex600 DFC with a Pixhawk 4 mini.
“If your RPM is at 1940 on the throttle curve then there is no way this governor will keep it at 800 RPM.”
The throttle curve is a percentage of the total output RPM, it’s not an exact RPM number, so it’s impossible to know the RPM from the throttle curve or do I see this wrong?
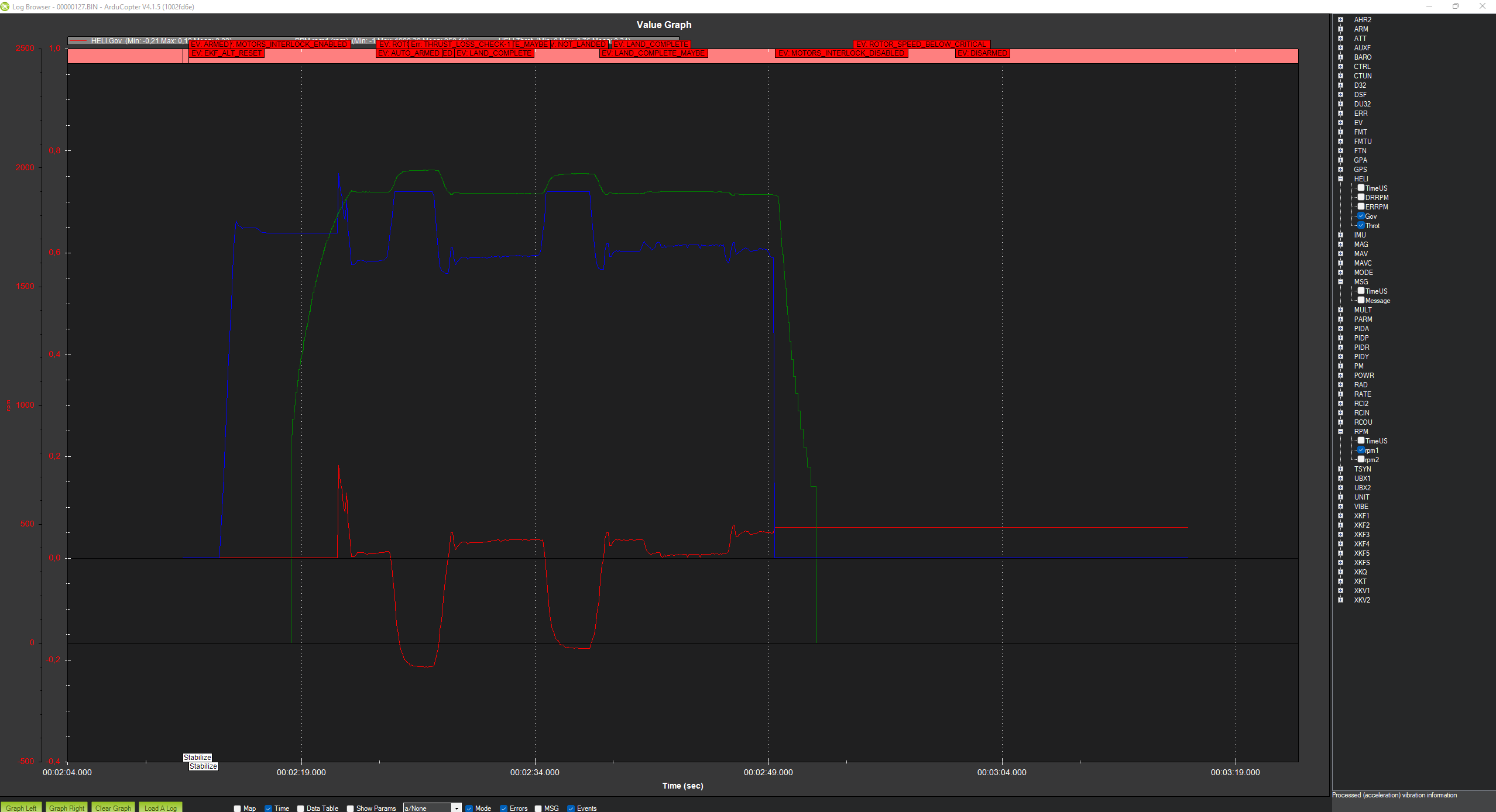
I found the sections in the log, but I can’t actually make up if the governor really works correctly from this, can you?
The throttle curve is a percentage of total engine power not RPM. Now in the case of an electric motor, I suppose you could argue that there might be some relationship between throttle output and RPM of the motor and thus RPM of the rotor. My point was that the RPM Governor Setpoint was set for 800 RPM and you were showing 1940 RPM as read by some RPM sensor. That is why I said that the governor would never be able to hold 800 RPM if the throttle curve was set such that the rotor RPM given by the throttle curve resulted in a rotor speed of 1940 RPM.
As shown on your plot, the governor is working because the Heli.gov output is not zero. So it is trying to hold speed but doesn’t have enough authority to do so. I think you would need to raise the droop compensator. 30% seems pretty low but I don’t use the internal governor much. I use the Governor in the ESC for my electric heli’s. It looks like you were running this with no blades on the bench since you were going full collective. The governor would behave differently when the heli is flying and blades are producing drag.
Have you tuned the throttle curve in flight? I’m assuming the values shown are from tuning in flight?
I am not the one to really provide tuning advice for the governor. I have a small amount of experience with it and mostly from tuning it in the realflight simulator on a simulated gas heli.
By the way what is the range of your actual collective blade pitch? I don’t think your H_COL_MID looks right? what collective blade pitch in degrees does the PWM value for H_COL_MID correspond to?
You are welcome! I enjoy doing it. Hopefully the autotune works well for you.
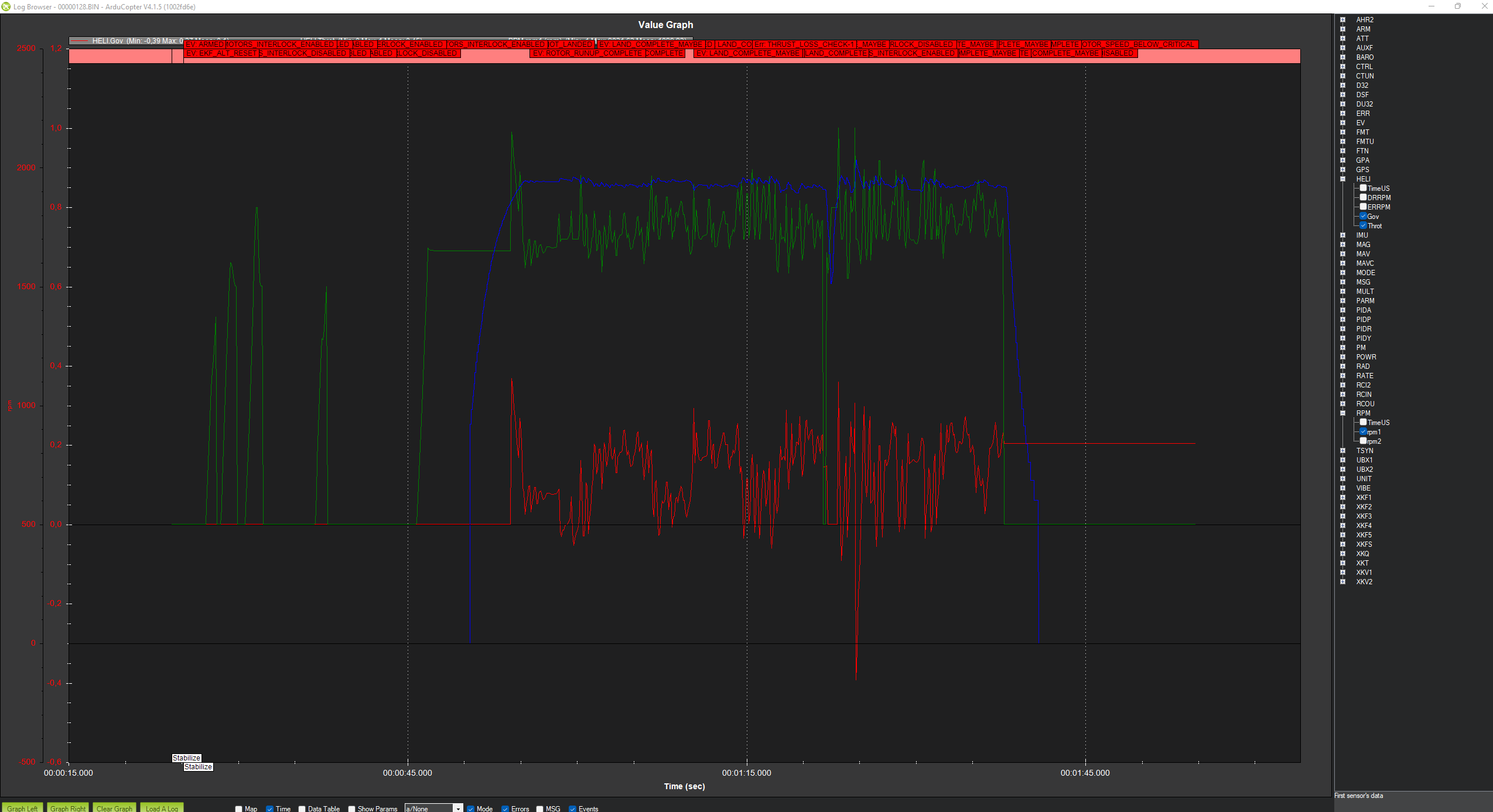
I think the governor is now just working fine, I raised the droop compensator to about 60%, and set the setpoint to 1950 RPM.
But I need to field test this first, because its all on the bench now as you stated correctly without blades on.
I made and designed my own RPM sensor, because it was deadcheap and a challenge to make, and because I couldn’t find any decent 100A ESC with Blheli_32 online.
For anybody who might be interested in this, the design and guide can be found here: https://www.thingiverse.com/thing:5239174
I can’t seem to understand why you are worried about the H_COL_MID, when I configure the H_SV_MAN=3 the pitch is exactly 0°, with H_SV_MAN to 2 and 3 it’s -10° and +10° which is fine for me now, because I don’t want it to be to aggresive.
I flew the heli before, also in auto mode and it’s fine, but the manual tuning part was too difficult for me to do completely and correctly.
Now wait for better weather and try the autotune!
It’s getting boring but many thanks again!! Regards Orson