Hi,
We are currently trying to tune our plane for automatic takeoff. It is a 10kg tricycle plane, with the motor at the front.
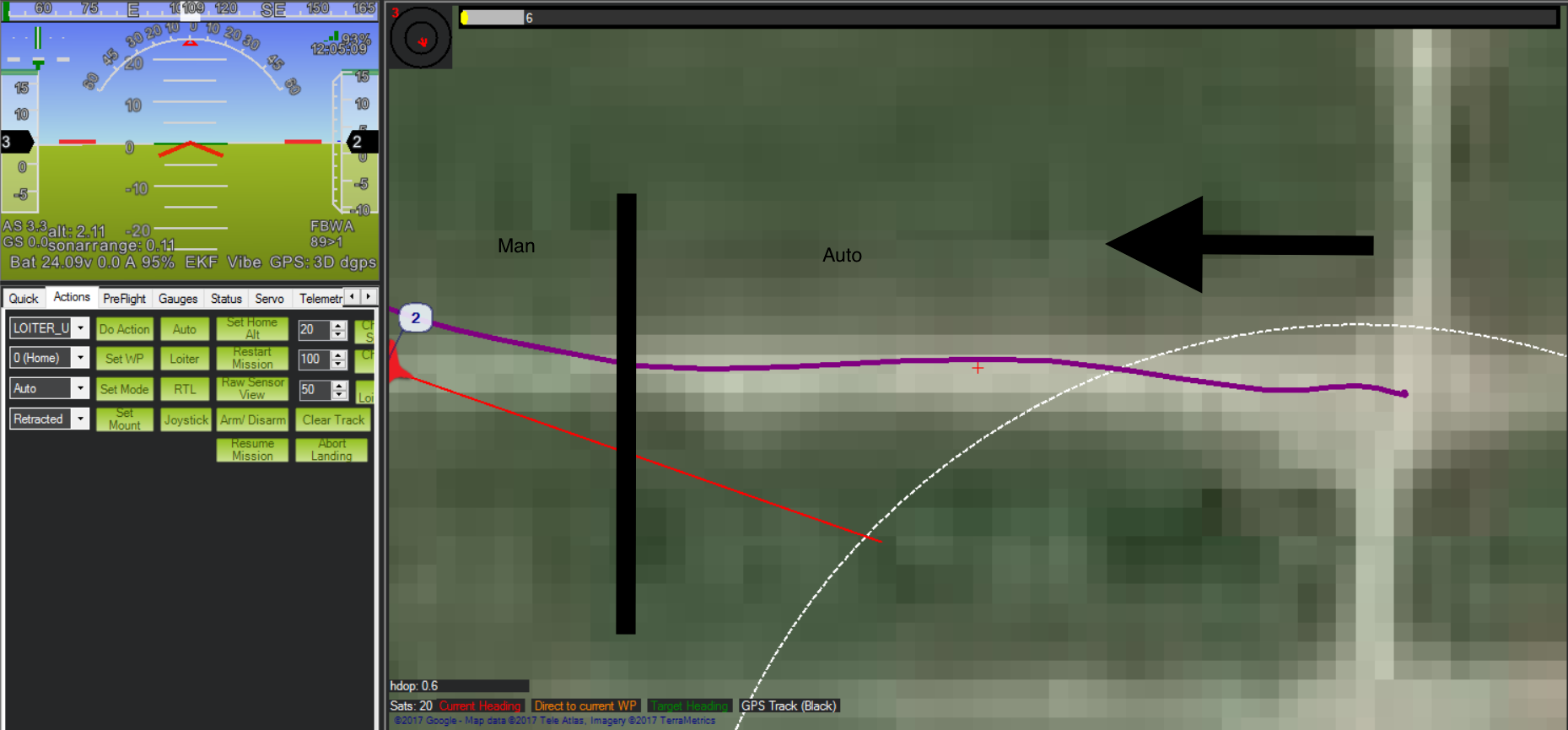
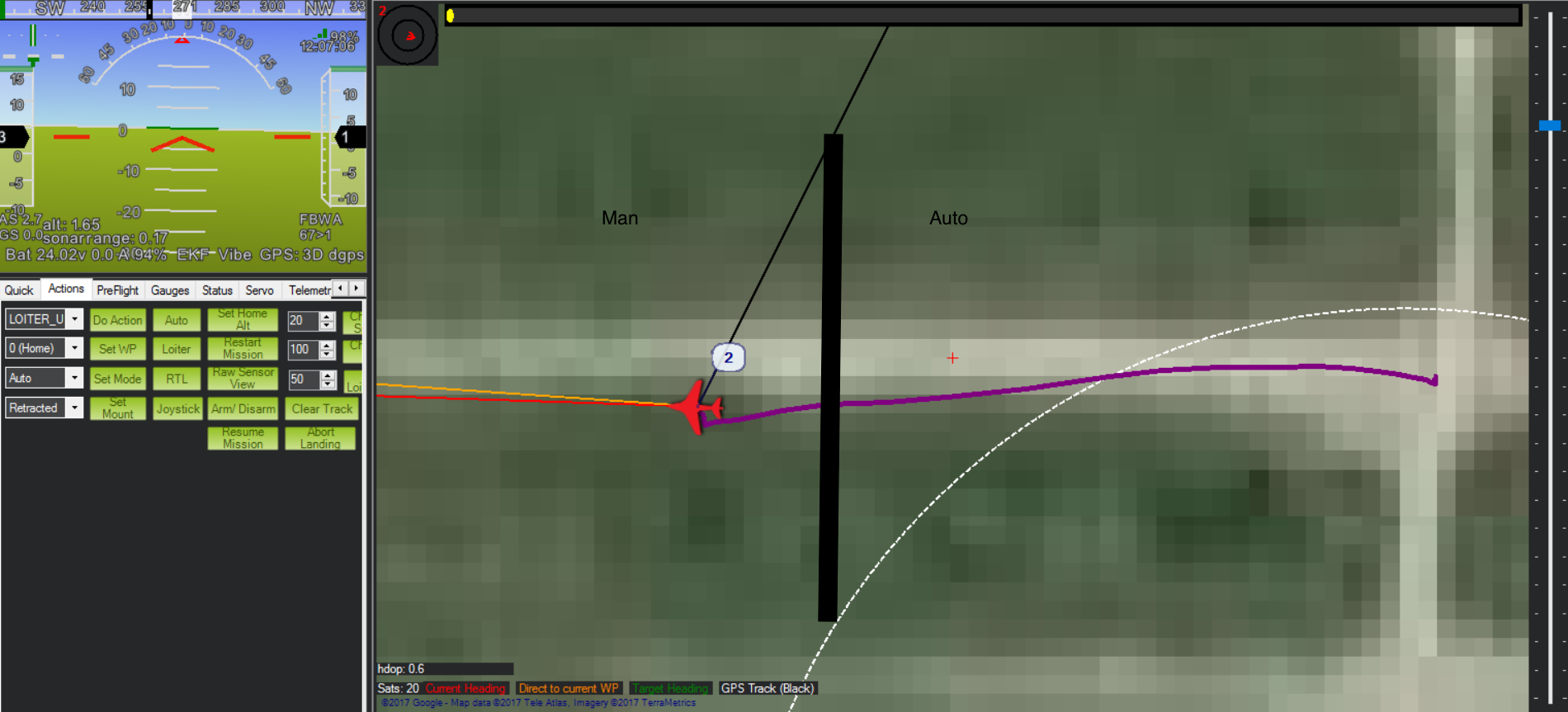
It tends to veer away from where it was pointing a few seconds after starting the takeoff sequence. A few times, it seems the course of the plane was locked a few degrees of the heading it should have been (according to the telemetry logs), while other times it has the right heading but seems to fail to keep it. Sometimes it works well and the takeoff is successful.
The runway is very bumpy grass, so the steering wheel is not always in contact with the ground.
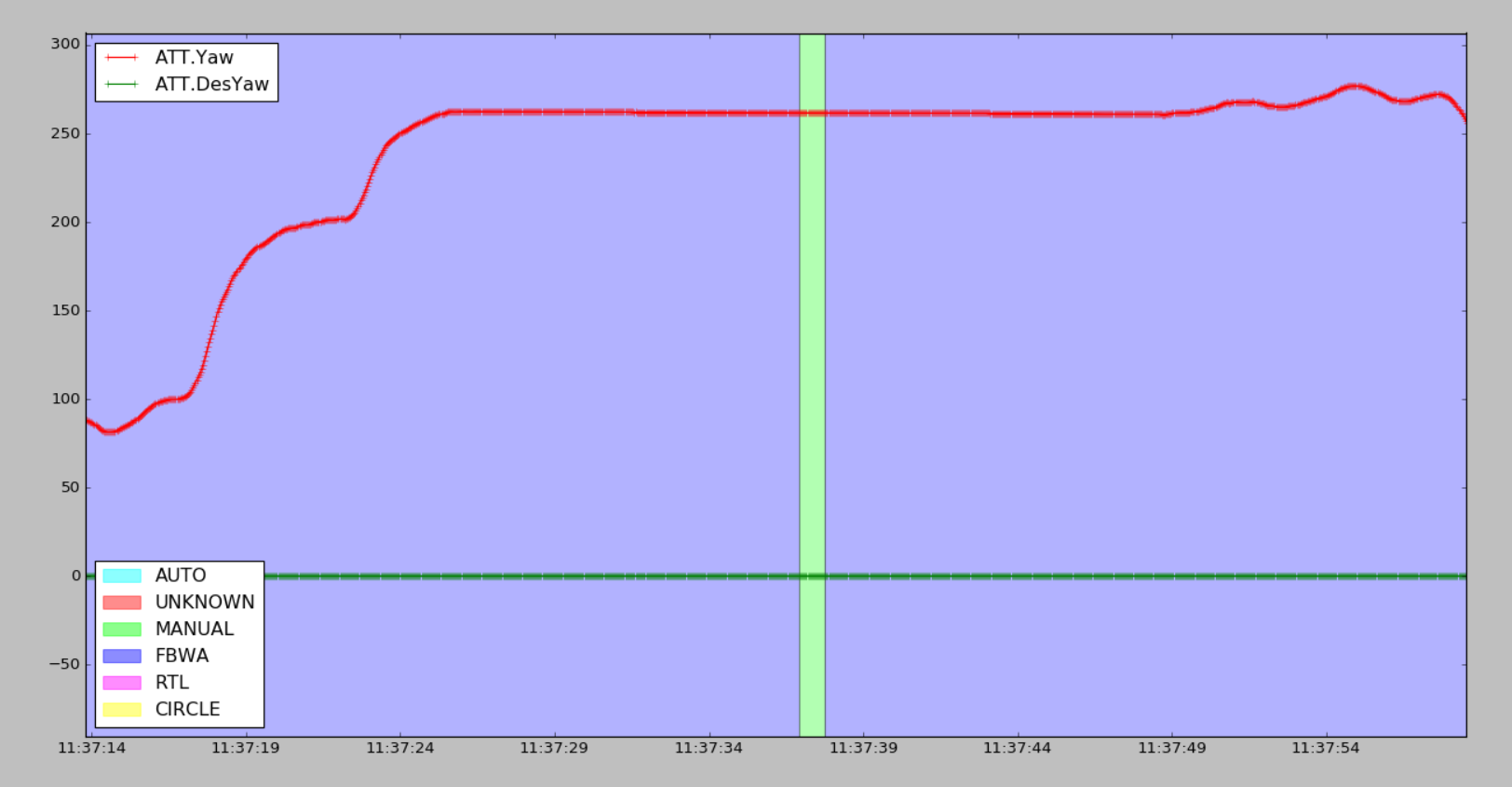
I’d like to know which parameters to look for in the BIN logs to know what is really happening. It seems like the ATT.Yaw and ATT.DesYaw does not provide the information I’m looking for:
Thanks for providing with some guidance to diagnose my steering issues.
not an expert on this, but doesn’t it use the compass and GPS to keep your heading?
Have you checked that your compass isn’t being impacted by your motor?
Compass is enabled and seems to work well.
The EKF stays normal with full throttle on the ground.
Tried tuning the compass with motor, but mission planner tells me “Invalid preflight calibration” and refuses to enter the calibration mode.
Here are examples of low frequency weaving we are experiencing. I could provide some BIN logs, but the current ones are very messy and I’d rather take the time to provide clean ones were we dont change the settings all the time. The settings are attached. We found that a low P and high D provides the best results, as is a high minimum GPS speed.
46.BIN.param (12.4 KB)
Hi,
By boosting the P from 1 to 8 we got great results. There is still some oscillation but the plane is keeping its course. It is however getting harder to see what the plane is actually doing because the error is getting smaller and I would really like to get back to my first question:
What to look for in the bin logs to do a more precise tuning of the steering?
Thank you