I am running the following:
Windows 10 64 Bit
Mission Planner 1.3.74 Build 1.3.7563.27684
3DR Pixhawk PX4 (Hardware from 2014) Running ArduCopter V4.0.7 (0bb18a15) // Was previously running 3.4.5, had not used it for over 4 years, kept in a dry cool environment
X-Frame configuration
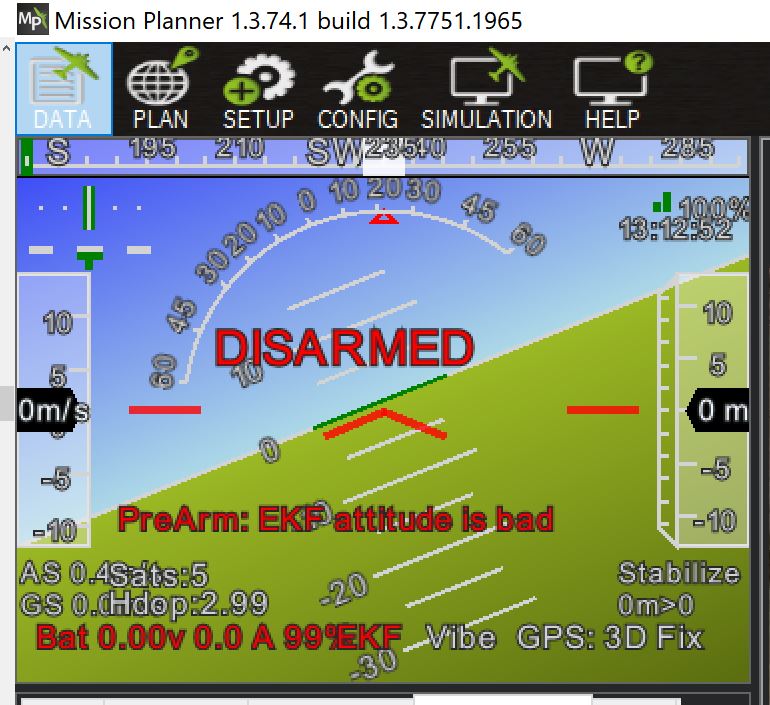
When I roll my quadcopter when connected to Mission Planner, the roll is reversed. The pitch and yaw are fine though. I have not taken it for a flight yet. Why would I be seeing this?