Does any body have their roll/pitch controls reversed after sometime while flying in loiter and super simple mode enabled? Using latest AC 4.5.1.
With regards to super simple (ss) mode, please define the reference frame for “reversed” in greater detail.
Do you mean
- you fly around in ss and at some point the drone doesn’t tilt right (from your point of view) when you pull the roll stick to the right, regardless of the heading of the drone
- you fly around in ss and at some point the drone doesn’t tilt to it’s right side (starboard) when you pull the roll stick to the right, regardless of your point of view
- you fly around in ss so that the drone ends up yawed 180° compared to the start, then you switch to a different, non-ss flight mode and the drone tilts to it’s left side (portside) when you pull the roll stick to the right
- or something else?
Sorry for not being clear. Here is what happens.
- Start flying in stabilize, ss mode with nose pointing away.
- After gaining altitude, switch to loiter in ss mode. all ok, when I move TX stick right, drone moves right. same with left, forward and backward.
- suddenly at some point the controls are reversed. I move stick right the drone moves left and same for other directions. All relative to home position irrespective the nose direction of copter.
- Land and check log, no errors.
CUAV PX4, pixhawkv1-bdshot
This sounds like typical Super Simple Mode behavior. It’s not true that “suddenly at some point the controls are reversed” that doesn’t happen. It’s usually a misunderstanding of this Mode Modifier. You have SS on a switch right? Not assigned to a flight mode, which is a bad idea.
Yours would not be the 1st, or the 10th, post about this topic.
Yes you are correct. I must have moved the copter behind the home position and also myself, with it in front of me. So the reverse control response makes sense. I have mapped the modes to six buttons on my TX16s.
I meant how you have configured Super Simple Mode. Using these checkboxes is the wrong way:
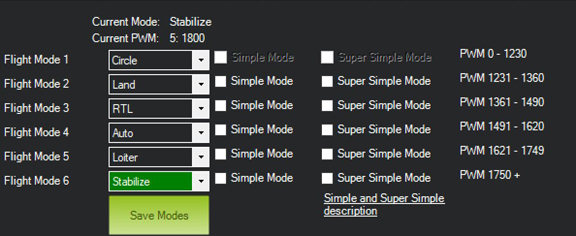
Yes using these check boxes. Did not knew this is wrong way. what is the correct way?
Make them independent of flight mode by configuring a switch to enable/disable Simple Mode and/or Super Simple Mode.
Hi @fqahmad66,
I think the issue is that there’s a 10m circle around home within which the roll/pitch directions won’t be updated. So the moment the vehicle crosses this line you could see a change in the roll/pitch mapping. This is mentioned on the super simple wiki page.
Thanks for the report though in any case.
Hi, may I ask how the ardupilot handles the cross-zone problem between the current yaw Angle and the expected yaw Angle? The range of both is -180 degrees to 180 degrees, but during yaw control, the difference between the two will fluctuate greatly at the interval boundary
Hi @dangyl,
I’m not sure I completely understand the question but in short, the roll/pitch mapping is only updated when the vehicle is outside the 10m circle around home.
What interval boundary?