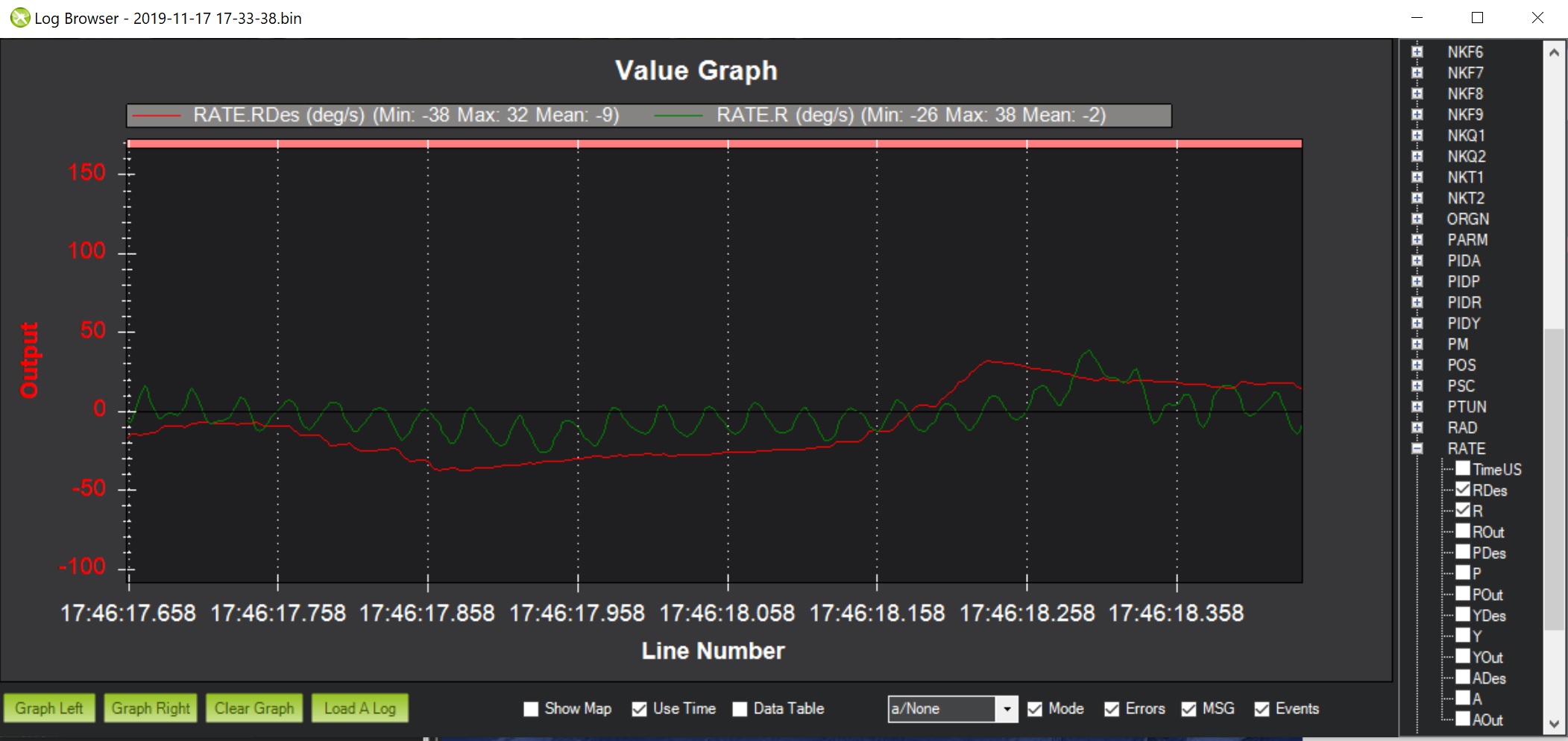
I wondering if someone can tell my why my log data looks like the actual roll is oscillating and not closely matching the des roll?
I have the latest firmware installed 3.6.11 on a pixhawk FC. Its installed to a align dfc 600, using ds610 cyclic servos.
The helicopter is not oscillating in flight and seems to be flying very nicely.
I have tried dropping the vff and ATC_angle_xx settings with no change.
looking at the tuning page examples it shows these two logs should be a nice smooth line unlike mine which seems to be all over the shop and fuzzy.
Hi Aaron,
That is a vibration. Either due to rotor balance or rotor tracking. What rotor speed are you running? This has nothing to do with the tuning parameters. So set them back to what you determined for good tuning. The vibrations could affect how much you can increase your gains though. Just depends on how bad the vibrations are.
Regards
Bill
Thanks for your reply. I will check it out this arvo. I’m pretty sure my tracking is on point, I’m thinking it may be more likely the balance. My rotor RPM is approx 2000 but i am thinking about dropping it down.
Yeah I have them set to zero at the moment as I am still in the process of tuning the heli. I am wanting to set VFF first using the logs then move onto the ATC_RAT_XXX after that. The oscillations are my current road block and will try my best to get them down, even despite the chopper flying pretty well.
I will let you know how I go. Thanks for your help.
So you can use the filters in the INS to reduce the noise. With the head speeds you are running, you could set the filters (INS_GYRO_FILTER and INS_ACCEL_FILTER) at 10 hz and you should get good attenuation. that will help with the control loops. Especially the derivative terms. If you want to attenuate it more then you then you can use the ATC_RAT_XXX_FILT and set to 10 hz. If you really want to target a specific freq then you use the notch filter.