Hi All,
Some background info on me quickly; I have been building my drone with a friend over the past few weeks and boy there is a lot to learn! We haven’t done that badly with only a couple of crashes under our belts. I introduced my drone to a tree pretty early on! 
I want to pop a mobius gimbal on it shortly but need it running right before I do, I did complete a successful autotune yesterday and did confirm different PID results in Mission Planner.
I’ve locked down my design on the S500 frame and I did my second FPV flight in drift (Airplane) mode today. Upon reviewing some the logs through the graphing, I noticed the pitch commanded vs pitch looked good but it got the wobbles occasionally on roll. I could really induce them passing around 50kph (13.8 metres per second) and it was very noticeable while flying in FPV, hearing the props really working to stablize the drone during turns. A point of interest is in Drift mode when I released the stick while flying forward, it quicked raised the nose and washed of the speed nice and quickly. Upon completing some orbits around the field it would rock left and right quite a bit through the turns and on the straights.
I was wondering as a quick check, would someone be able to review some of the key information in my logs and point me to any shortfalls I might have, not necessarily roll (but would be nice) but also generally? I did notice a GPS error in the auto analysis of the logs but checking the info, it looks to be at the end of the flight?
Logs and files: HERE
Build
- Holybro PX4 2.4.6 running 3.5
- S500 Frame
- 10x4.5 Props
- Multistar Elite 2810 750
- 30A Mini ESC w/ OPTO Afro race spec
- ZIPPY Flightmax 5000mAh 4S1P 20C
Auto Analysis of logs
Duration 0:21:59
Vehicletype ArduCopter
Firmware Version V3.5.0
Firmware Hash 633501f9
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = GOOD -
Test: Compass = FAIL - Large change in mag_field (135.16%)
Max mag field length (784.22) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.45, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = WARN - Motor channel averages = [1408, 1540, 1421, 1535]
Average motor output = 1476
Difference between min and max motor averages = 132
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = GOOD -
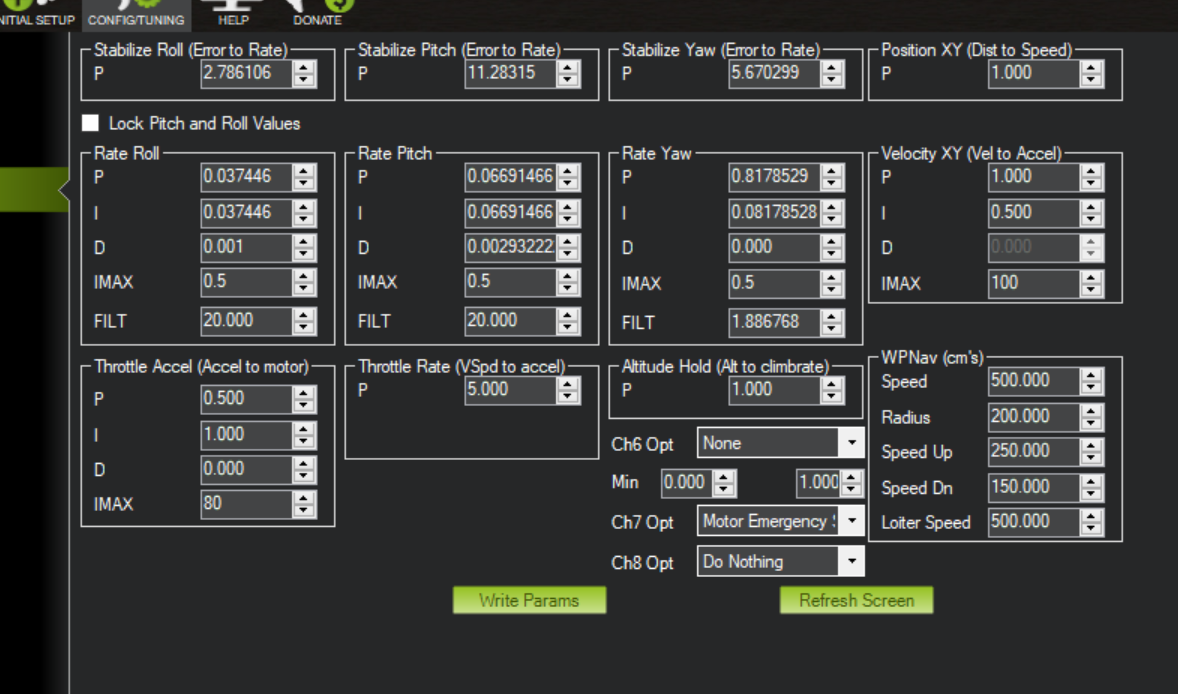
Default

Autotune
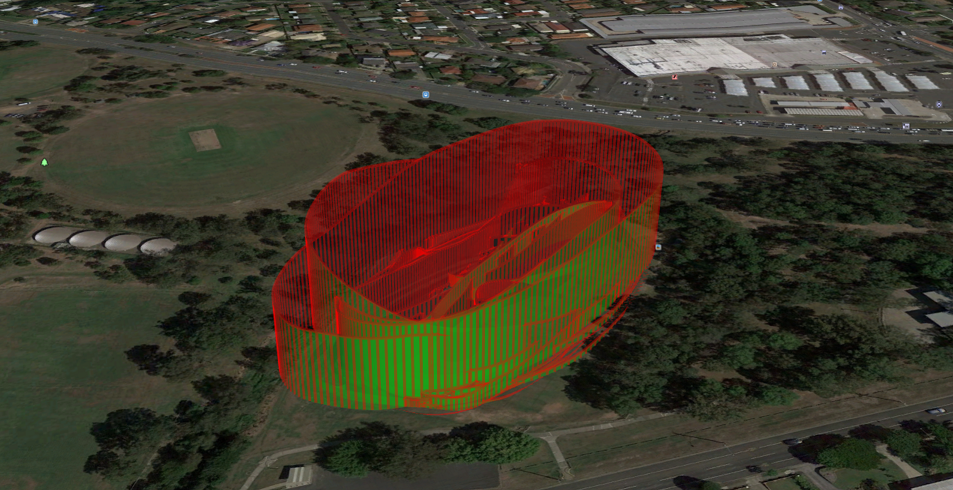
The current design, popped 2 props on to show what they cover on the frame

The Flight
Thanks again guys, apologies if I missed uploading something! Really enjoying this new hobby.