Hello!
During my last flight I had an issue with pretty much hardware stable (as I thought) quad. I’m flying in AUTO mode. Right after takeoff quad started to climb at full throttle straight up into the sky. I tried to change mode to RTL with transmitter, but it had no effect and quad dissapeared into the clouds. After 20 minutes battery died and quad crashed nearby.
There is a tricky part. I’m using RTK GPS and trying to make a quad capable of precise landing, so during expirements I changed some of EKF parameters:
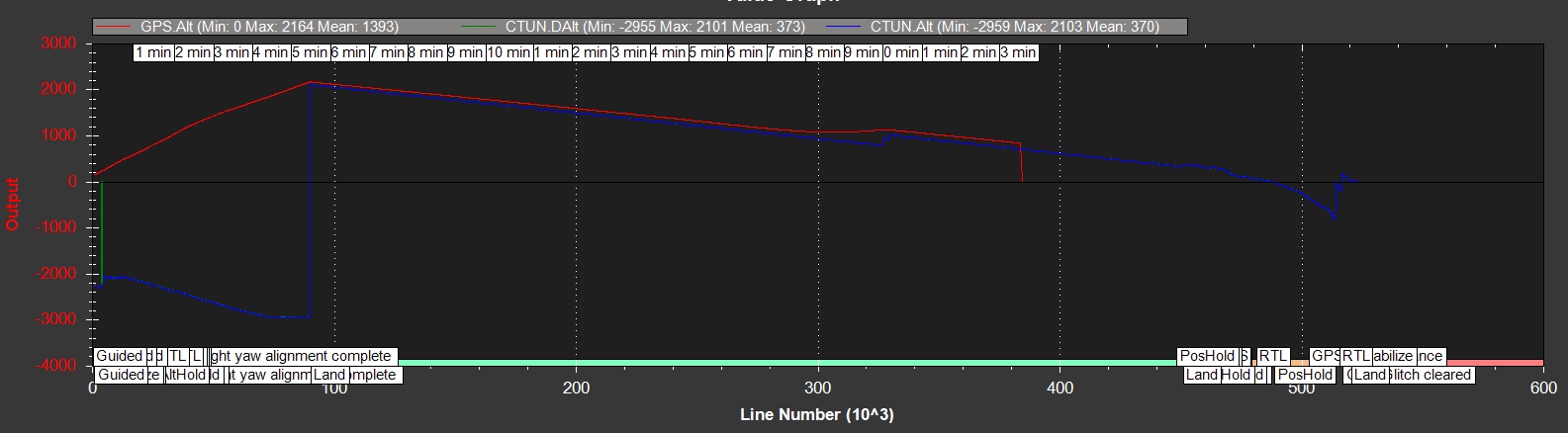
After looking into the logs it turns out that EKF origin of quad was 2000 meters underground. GPS and baro were OK, but the error kept for 5 minutes, then altitudes suddenly came in sync.
You had no prearm logging, so it’s hard to say, but when setting primary alt_source to something as sketchy as GPS, (even with RTK) you really need to check your instruments before takeoff.
Given the solid HDOP and fix reported, it must be some kind of bug in the GNSS processing code/chipset)
Also, you could have landed safely at any time by switching to Stabilize, ACRO, or any of the altitude-stabilized modes.
Did you set the rtl alttitude?it comes 20 meters default rtl alttitude.which flight controller are you using?after switching on th rtl switch did you turn it back off?it happened to me also and it almost reached the clouds and i was not knowing that it was going up 20 meters because of rtl and that time default rtl alttitude was 20 meters but after then i disarmed the motors and when it started to fall down and have reached very low alttitude i agian started the motors and safely landed.so please check the rtl attitude and lowest thurst to motors.I hope this would help you.Thank you.