Hi
I am new to RC and Drone so please bear with me,
I have assembled a quad and after some crashes,I was starting to getting the feel with it.
The quad is meant to become an aerial drone.
So its a 450 frame with 920kv motors, 10" props and a 5200mhA S3. Weight is about 720g without props.
Flight controller is a PX4 Pixhawk 2.4.8
It has not been placed on any foam or anything to dampen vibration, so my guess is that is the cause
There a probably tons of things that hasn’t been configured, its a bit overwhelming.
There no extra stuff on it like , gps, camera etc.
Mission planner 1.3.49 build 1.1.6417.13138 APM:copter 3.5.2
What happend was:
I was having a bit of difficulty using alt hold and land, it will still climb in both mode, had worked ok before.
Well, before I would take it down for troubleshooting I thought I would just give it boost into air. But it just kept climbing.
I started to panic and I tried various stuff like switching to stabilized mode and land and alt hold mode. It went so high I lost sight of it. I tried to turn off transmitter but Tx just said I had to turn off Rx also, I dont know what effect it had.
After a couple of hour drone was found…Seems like it had landed HARD, but leveled, since all props was broken of and battery fixing had broken. but rest seemed fine.
I was hoping someone could tell me 2 things.
What was the cause?
And what is normal to do in case anything like this happen?.
Radio failsafe should operate a LAND command with no GPS if set up correctly.
Stabilize mode and drop the throttle to zero will get it down quickly (called a crash).Drop the throttle to zero in alt hold will bring it down slowly.
@Jagger
Land, didnt seem to help, it still climbed when switching to land…unless I didnt something wrong.
I dont know if I actualy tried stabilzed and 0 thrust.
Is it possible to have a failsafe that will overwrite everything but eg 5% power to motor, since I cant trust barometer when stuff like this happens?
Can you tell from log why it started to descend and if any thrust was on motor when it made touch-down?
Thanks again for answer, I apparently need a lot more tweaking.
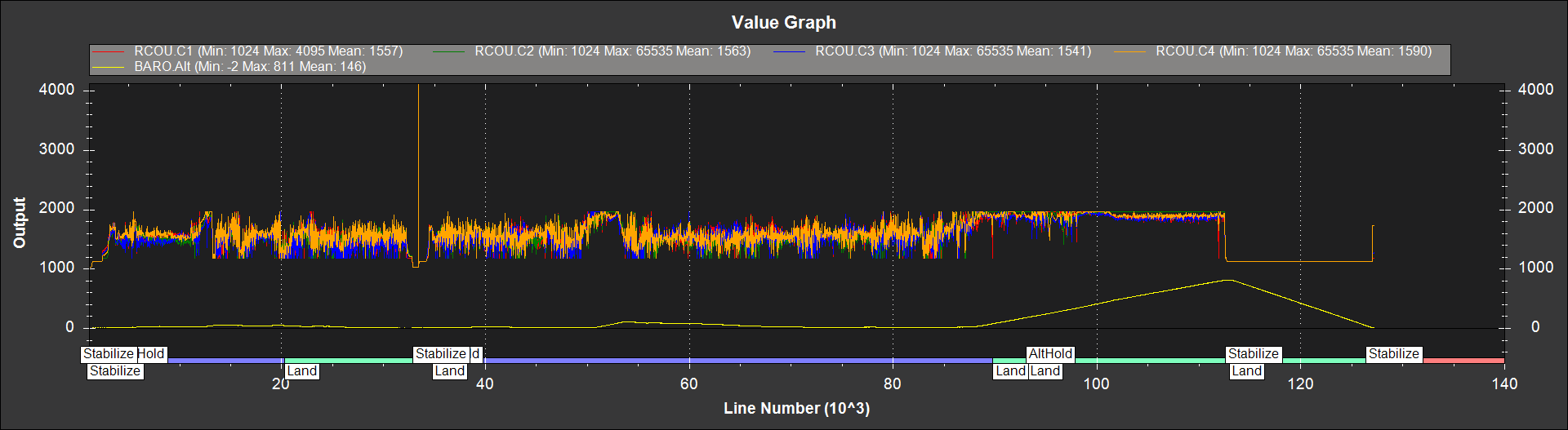
The motors cut out at 811 metres altitude after running flat out for a while.No battery numbers available in the log (needs power module) but it probably exhausted the lipo.No,the props were not spinning on the way down.Motor output vs barometer alt.
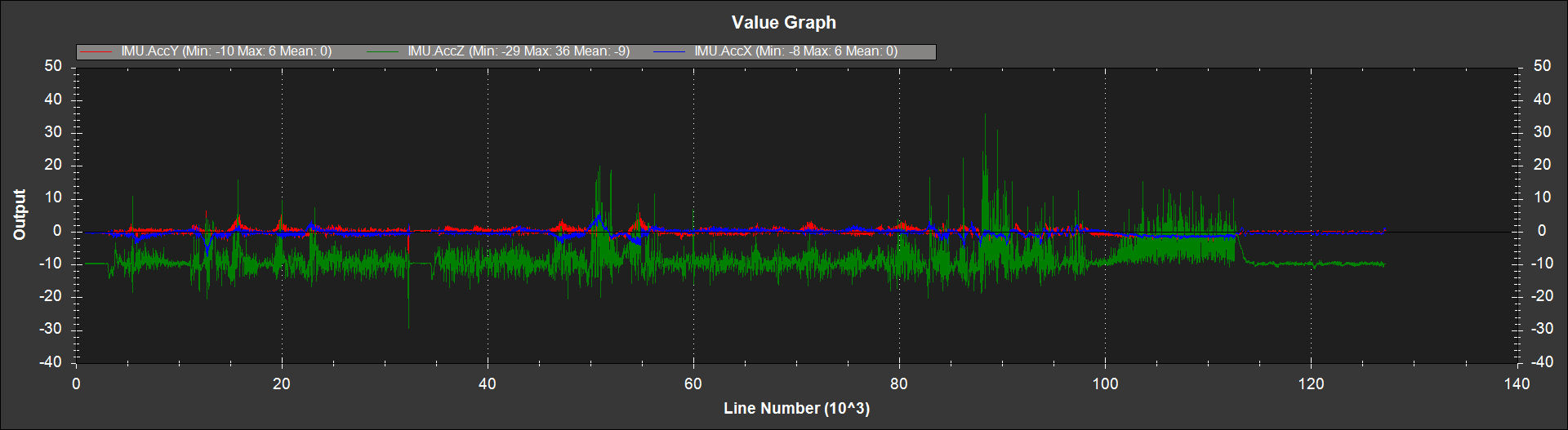
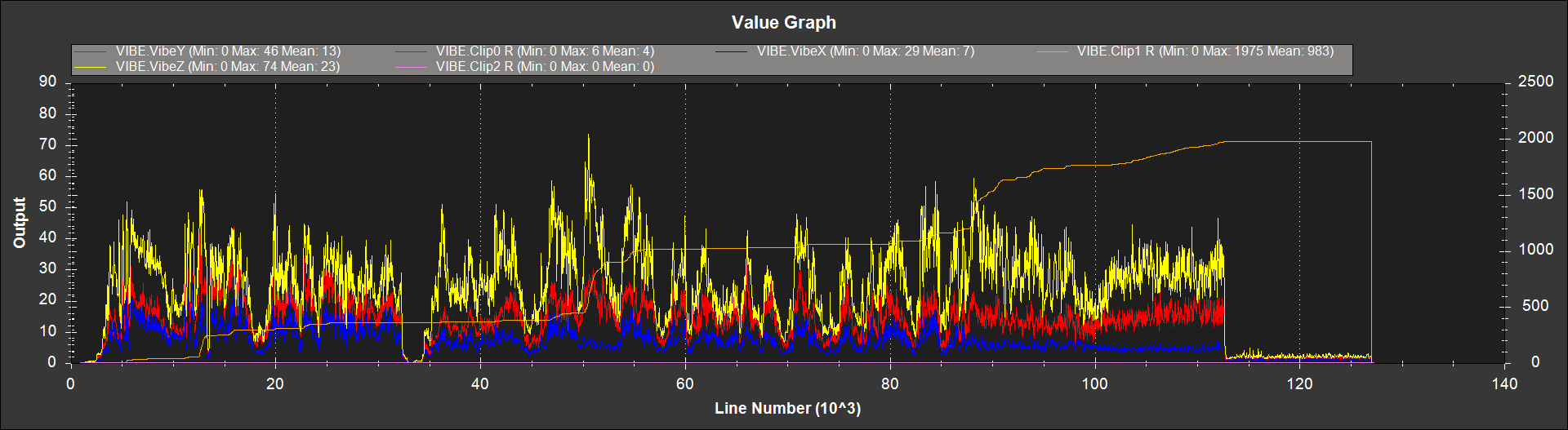
The vibration is nasty and can easily have caused this flyaway.I always use Zeal gel for mounting mine.Probably should be your first move.It’s the Z axis that shows problems.(That’s the uppydowny bit in technical terms).
The barometer worked perfectly but the vibes can shake the life out of the accelerometers and therefore produce some pretty wacky commands or lack of command.So stop trying to find a workaround to this particular flight and try to get the set up better next time out.Vibe reduction is always number one (vibes under 30 in the 3.3 log with no clipping ).Zeal gel or similar usually works.That is the place to start.
Any reason for not having a GPS ? It gives far more capability like returning to launch in the case of certain hardware failures.It wouldn’t have helped here mind.
I’m not sure tht anything you did would have helped in this instance.The flight controller was being beaten to death by the vibes at the time and may have not been in a very good listening mood.Stabilize and zero throttle should have brought it down.Dropping the throttle in ALT_HOLD or LAND will bring it down slow.You didn’t have it in STABILIZE long enough to ditch it this way.Remember that next flight.Stabilize tis the mode that puts you in control.All the others rely on various flight controller input and if it’s shaking to death at the time…
It does get the adrenalin going when it stops doing what you want it to do.
"It does get the adrenalin going when it stops doing what you want it to do. "
Hehe, it sure did. Actualy I got a bit affraid, think what a 5200mha battery can do to someone in free fall.
Thanks for taking the time again.
I should have mentioned that I didnt have power module, still waiting for it to arrive in mail.
I dont know why I didnt tried long enough for stabilized mode to have effect. I think I thought I lost all connection to drone. I have bought a Glass Fiber Shock Absorber Anti-vibration Set that I will put on.
Battery wasnt dead, but i will throw it out anyway… it have a funny shape after I recovered it.
Reason I dont have GPS, is because drone is not finished. I am just trying to get the feel for it all, (RC, soldring, software configuration, hardware configuration) , until I invested in rest of the stuff I need on it.