Hi all,
I have encountered a weird issue with my copter.
After takeoff the Yaw start spinning.
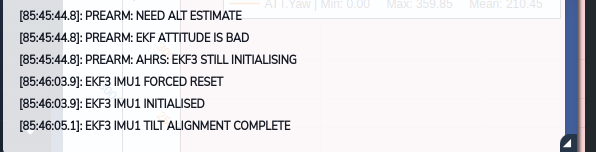
When I looked at the logs I saw that the Pre-arm check of INS has failed but I was still able to arm.
My Arming_Check value is set to 33008 which includes the INS.