Hi.
I recently installed a third compass on pixhawk 2.4.8 hexacopter. It’s RM3100 running on i2C. While analyzing the logs, I noticed that the resolution or sampling time of this compass seems too low. As the RM3100 resolution is programmed, I wanted to ask if the driver has an error, Arducopter 4.0.5 software.
best regards
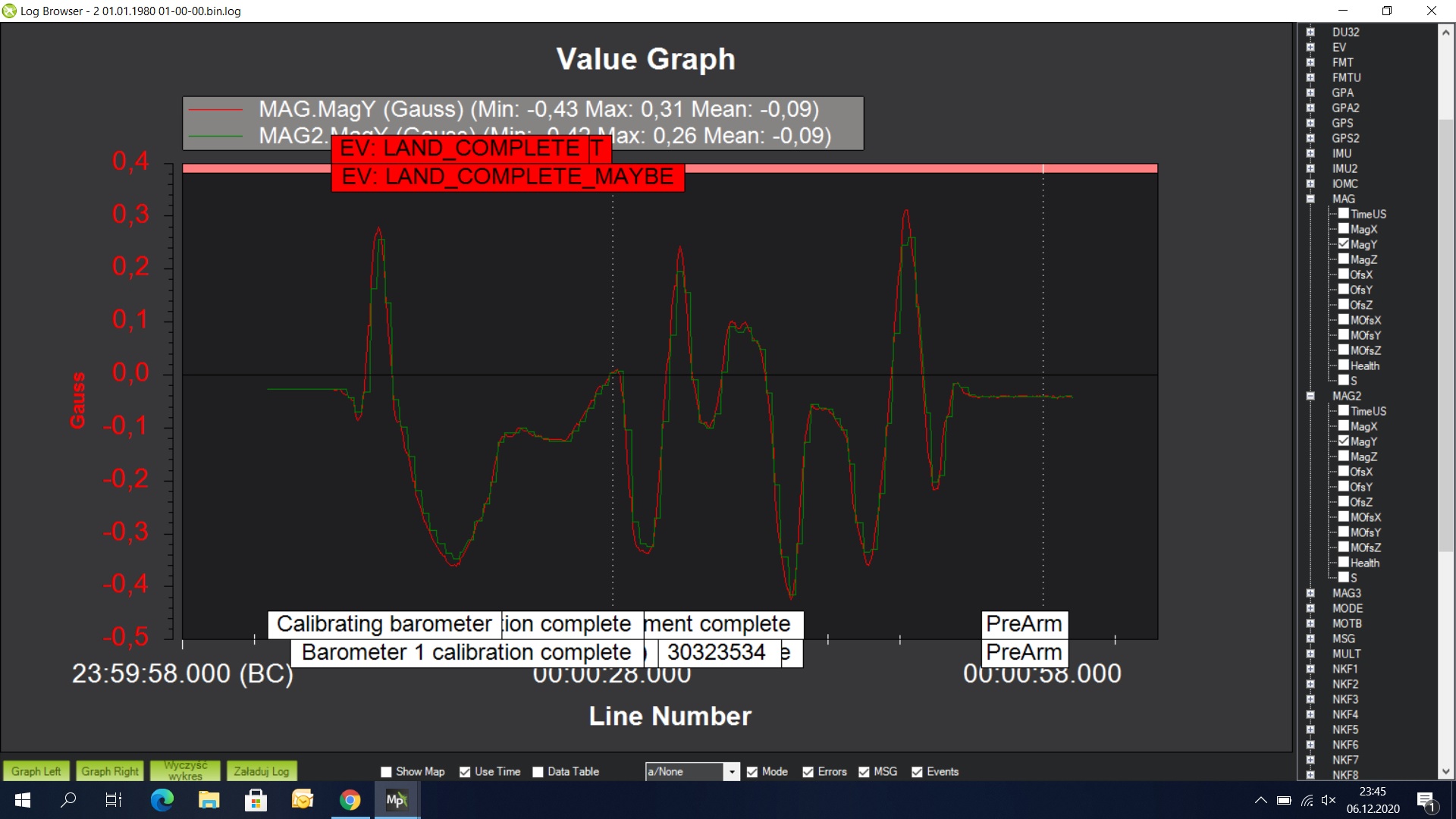
RM3100 it’s this graph in green
https://megawrzuta.pl/download/f5fcdf7fb08c6d42e19c626020cb3d5c.html
above, a short log with log_disarm = 1 no flight but only tilting the drone
after i think the sampling rate of rm3100 in my pixhawk 1 is too low. does anyone have rm3100 for pixhawk 2.4.8 and the samples are more frequent. On i2c I also have a third compass, a second barometer and LCD and they work ok, I’m curious if it’s software’s fault or something else …