Hello everyone I’ve posted this issues on a few different sites.
I have a brand new here link unit with orange cube.
I have calibrated radio and controls in;
Here link app
QGC app
Mission planner
After I take off I have no roll and pitch controls in any radio mode or flight mode.
I plug my air unit in load ardupilot MP and then my unit says I have roll and pitch controls (in mission planner, here link app, QGC) from my remote. I do have altitude and yaw controls along with my gimbal working perfectly assigned to other buttons.
I am trying to follow the first flight outline but I cannot set trims automatically if I can’t even fly my drone in every axis.
Hello everyone I’ve posted this issues on a few different sites.
I have a brand new here link unit with orange cube.
I have calibrated radio and controls in;
Here link app (including SBUS MODE 2)
QGC app
Mission planner
After I take off I have no roll and pitch controls in any radio mode or flight mode
I plug my air unit in load ardupilot MP and then my unit says I have roll and pitch controls (in mission planner, here link app, QGC) from my remote. I do have altitude and yaw controls along with my gimbal working perfectly assigned to other buttons.
I am trying to follow the first flight outline but I cannot set trims automatically if I can’t even fly my drone in every axis.
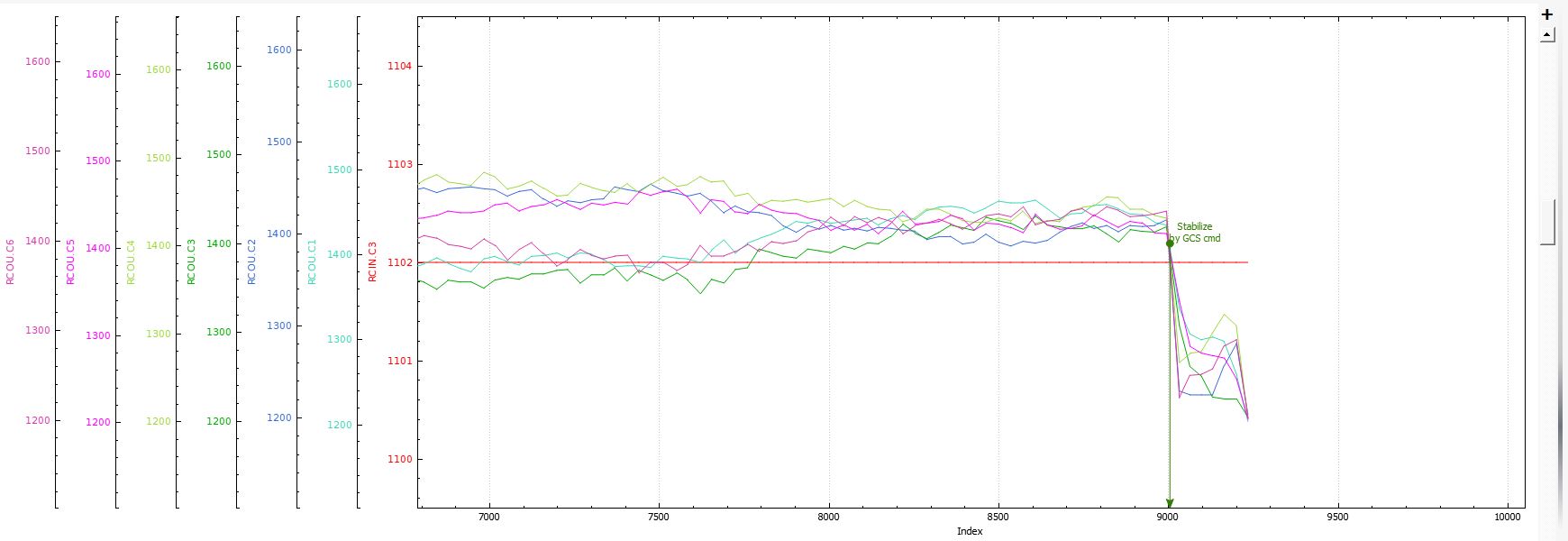
There’s 2 logs there. In both cases you were in GUIDED mode for the flights. Can’t see any evidence of a crash - no rapid changes in roll, pitch or altitude.
EDIT:
You were in STABILIZE for the last 2 seconds of the flight. Can’t see much happening in the log at that time. Are you able to describe what happened?
I am using a herelink controller and air unit as far as im concerned the only way you can not take off in guided mode is if you do a controller mod both left and right stick spring back to centers. When I touch Takeoff on my screen it gives me a desired altitude which I can change at anytime during my flight no issues there. I followed every step in https://ardupilot.org/copter/docs/tuning-process-instructions.html for 15 inch props shame on me right decided to start with a tarot 960…
anyways this new log
False crash didn’t leave ground too little predefined take off a ALT
First takeoff 5 feet ish everythings fine switch to ATL HOLD drone slowly starts to fall to ground then I caught it with my hand and disarmed after a few seconds of screwing around. Second takeoff 4 feet ish everythings fine switch to STABLIZE drone falls quickly catch drone with hand place on ground.