I want to follow the steps to the letter, but i did not see specifics for radio to txmod interface (going to model options and selecting SBUS out for example, which I did).
Here’s the video showing the problem I experience: rfd900 on cube orange, txmod v2 on tx16s. arducopter 4.1.5 - YouTube
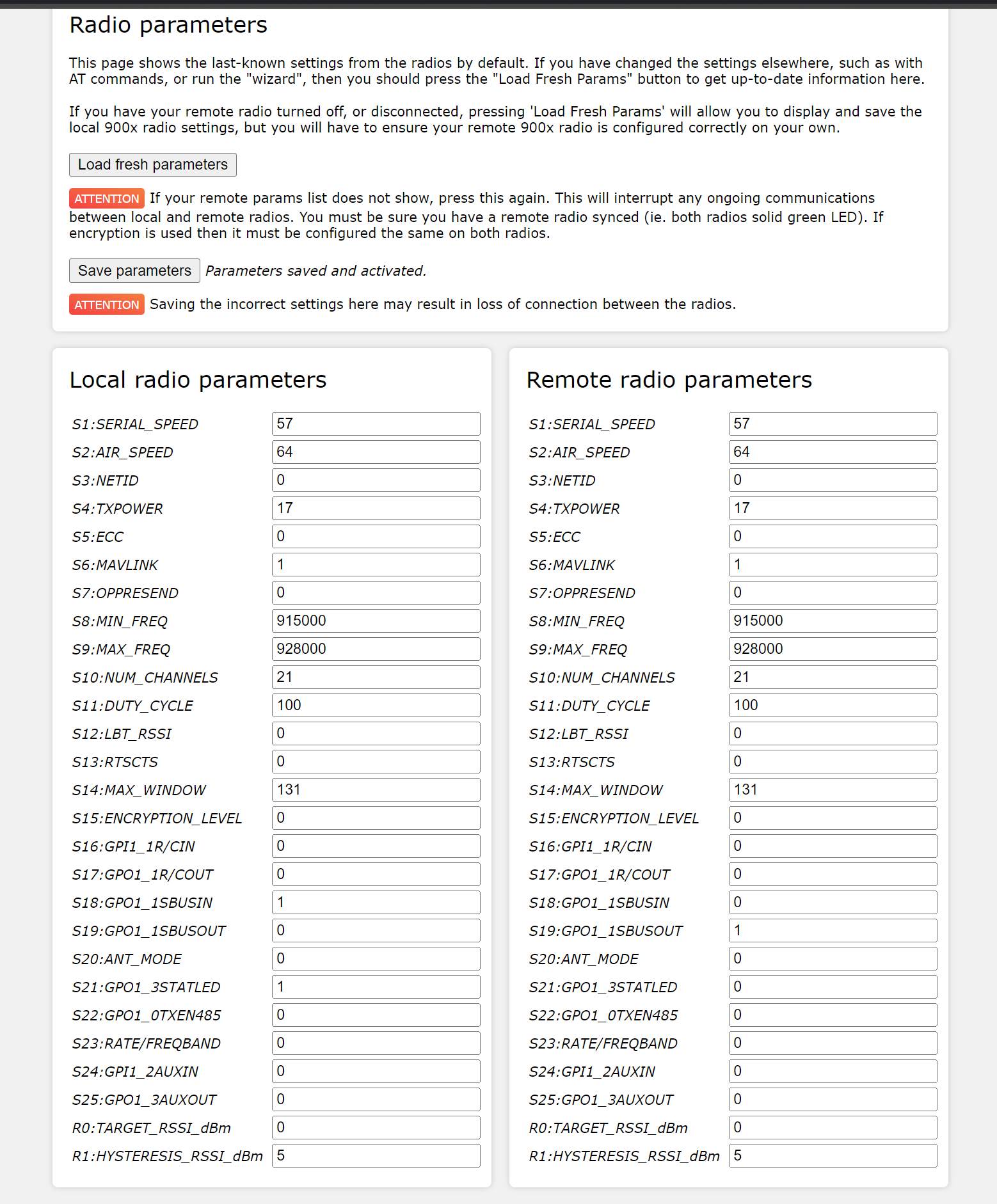
Also, both ground (local, txmod) and air (remote, rfd900) radio settings: