I hope someone will take the time to review my short log of hovering my Skyhunter 1800 that has been converted to a tilt-rotor VTOL. This tricopter hovers well in QLoiter mode, with the exception of Yaw, in which the plane’s yaw oscillates back and forth through about 45 degrees at a frequency of 1-2 Hz. Pitch and Roll are fairly stable.
Setup is:
Matek H743 running on AP Version 4.5.5, BDShot version.
Two front motors tilt; rear motor stationary; Yaw vectoring is enabled.
Dynamic notch filtering on both Notch#1 and #2
MagFit has been employed to set Compass Offsets; no serious motor interference on compass
Yaw Tuning has been set according to AP Quadplane Wiki
Log file shows obvious signs of Yaw oscillations
Allister, thanks for those filter setting. Does this mean my ESCs are not sending the ESC telemetry to the FC? Where can I look to check this? I spent a great deal of time setting that up, so I’d like to get that bidirectional DShot to work.
Just taking a quick glance nothing in the settings is glaring wrong. The Dshot message is in the startup messages so that’s good. What kind of ESCs are you using? Are they BLheli32, BLheliS, or Bluejay?
Admittedly inexpensive ESCs, but they are BLHeli-S, and they did successfully flash with Bluejay, so I thought they are working properly. I’m rechecking the parameters for the bidirectional telemetry. Where do I look to see if the telemetry is coming to the FC? Would I see it when connected to Mission Planner under “ESC1, ESC2, etc?
So I was able to recheck my BD ESC parameters, and sure enough, I overlooked setting the Servo_BLH_BDMASK, it was still zero. Changed that to 15 and now I see Active RPM readings in the Quik viewer of Mission Planner. I think that means I’m getting ESC telemetry, yes? (I tried to display ESC current also but that remained at zero). Perhaps my ESCs only report RPM?
Will do, when weather permits…thanks! I did try a Quiktune on the Yaw axis late yesterday (despite the notch filter not working), and it DID decrease the Yaw yo-yo quite a bit. It raised the Yaw P to 0.6. I think more might be necessary, but I’ll get the filtering working first, then go back to Quiktune.
Yeah, get the filter sorted before you chase the tuning too much. Mind you, if you used the throttle based filter values I gave you it should be close. The ESC filters will just be better.
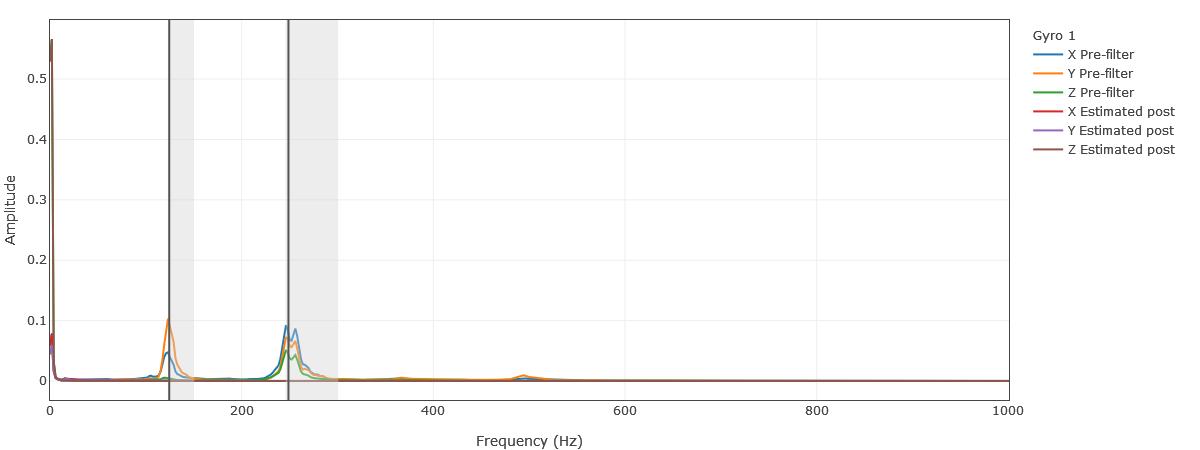
Here’s the new log file with the implemented notch filter. Please have a close look. This was a brief hover in QLoiter mode, low wind, no RC inputs other than throttle. It hovered very well, in place, but still has the Yaw yo-yo of about 15-20 degrees at about 1-2 Hz. My brief view of the Filter Analysis Tool seemed to show that the notch filter worked pretty well?
Verify the motors are perfectly aligned when you switch to q-hover or q-stabilized. This test you did was in q-loiter and I wonder if it’s worth checking again in Q-hover or q-stabilized just to eliminate the position controller from the equation.
What will the Q_P adjustments do? Just trying to learn from your suggestions.
I find it very hard to verify that the two front motors are in alignment with physical measurements, because this plane has independent wing halves that are not perfectly even side-to-side, so any slight difference in how the wings “hang” makes for large differences in prop-to-floor measurements. If there is a better measurement technique, I’m all ears.
My experience with trying QStab or QHover is that the plane drifts terribly, and I really have to stay on the sticks to keep it from crashing. What will QStab and Hover tests show?
Trying to address points 2 and possibly 3 above. I just blocked my VTOL wings and tail to be perfectly level (horizon and vert).
Measurement set 1 to try: Measure prop tips to floor for each motor in QStab mode. This should tell whether each motor is vertical with the plane, and aligned between motors, correct?
Measurement set #2 to try: Do the same in FBWA (or manual) mode, where bottom tip of prop is measured to floor.
If this seems an accurate way to test alignment, I’ll work on getting good measurements.
Normal process in the tuning to get the altitude controller setup. Based on your hover throttle values.
I think the process you’ve set out in your next post sounds good. As long as you have a consistent and repeatable way to measure the position of the props you should be in good order. And yes, FBWA needs to be even as well. If not the plane could roll more than the ailerons can recover from and then you’re done for.
Yes, Qstab is about as close to manual as it gets. In QHover you have some altitude control when the throttle is neutral. In both modes there is no horizontal positioning so it’s up to you to maintain that. Any wind and you need to adjust for it. The reason however that we do initial flights in these modes is because QLoiter adds in another level of complexity in the position controller. You haven’t tuned that yet (autotune or quick tune) so there’s no telling exactly what it’s doing. By hovering in Qstab or Qhover then we can focus on the mechanical and primary setup of the plane and get that ready. If that piece isn’t sorted out first there’s no point going on to the other steps. It’s the foundation of all the subsequent tuning.
OK, Q_P parameters set (P was at 0.3, but I was at 1.0)
Initial measurement in QStab show that both motors were leaning forward from vertical by about 1 cm, and they were leaning forward unequally between them. In Manual mode they were pretty close. Made SERVOn adjustments to align.
So, what should I be looking for when flying in QStab or QHover (other than white knuckles)?
I suggest really sharp stick ends on your radio so you don’t pinch too hard and over-control the plane.
Jokes aside, just a simple clean hover. 30 seconds or a minute will tell us lots in the logs. You’ll know right away if the yaw problem is cleaned up. Once it lands check that the motors aren’t hot.
If the yaw is better than keep working through the tuning instructions.
After rethinking the situation, I have concerns about my tilt servos that suggest I should put a hold on further tuning until I am confident in the servo performance.
When setting up the tilt servo throws between 0 and 90 degrees, I found that one of the servos could not attain the 90 degrees between 800 and 2200 uS. The other servo just barely attains the full 90 degrees. Someone suggested that I exceed those limits by changing the min/max in the Full Parameters, which I did, and that works, but I don’t feel comfortable that this is the right solution. The servos are rated for 180 degrees, but clearly the PMW range sent by the FC only moves them just shy of 90.
Also, when I select between flight modes QStab to FBWA and back again, the servos do not track in sync going up and down.
Something is amiss here, not sure what it is, but I need to fix this before going to all the work of aligning the motors and the further Quadplane tuning.
Performed QHover and QStab hovers this morning. Two Log file links attached.
Took off in QLoiter and switched to QHover (log 1). No obvious roll, pitch or yaw oscillations after the flight mode switch. Had to input pitch and roll to stay in place, due to low wind, as expected.
Took off in QLoiter and switched to QStab (log 2). No roll, pitch or yaw oscillations after flight mode switch. Similar pitch and roll inputs as QHover mode.
Motors were warm, but not hot.
***However, slow Yaw oscillations remain as before, in all three flight modes.
Please review and respond when you get a chance, thanks.