The craft is 5S, 750kv BLHeli32
1050-3-blade props, mounted on the bottom of the arms with 7 degreed outward angle.
Herelink, Hereflow, Here2, Rangefinder
CUAV Nora hard mounted, 4.0.5 (normally I use Cubes, but for this compact build I needed a brick-type FC)
I went through all the tuning instructions (countless times), harmonic filter setup, crashes, tried different components and am now really happy with the setup and the config. Last autotunes hit 18 for ATC_ANG_RLL/PIT_P
I’m quite confident that I have all the basics covered, however, there are a few points I would appreciate some input on:
- The stability of the rates is not bad, motors don’t get hot, but could they be improved further? How?
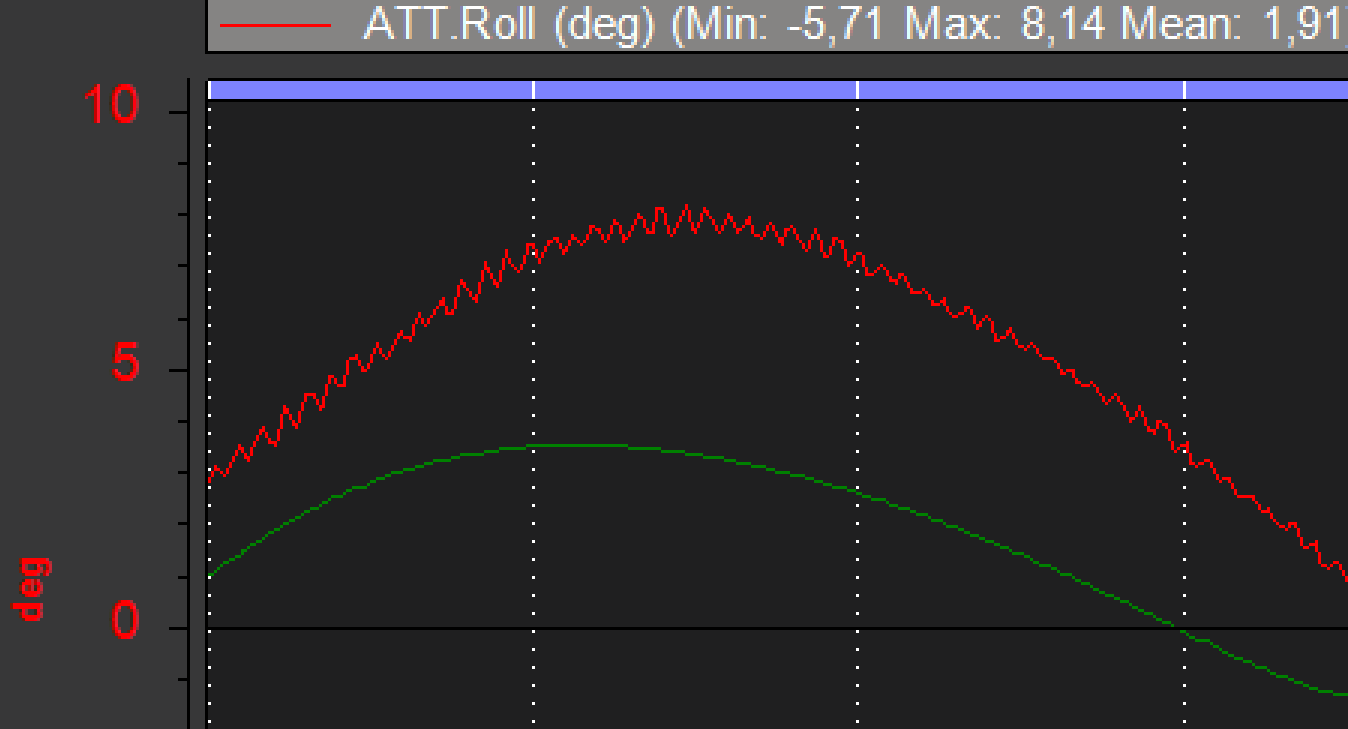
- I noticed with ATT FAST the Roll and Pitch show a fine sawtooth pattern when you zoom in. Is that normal or does it indicate some problem?
- I already reduced Mot_Thst_Expo to 0,5. However on descend there are still slight instabilities in the log, full throttle is stable. On that base should I reduce this parameter further?
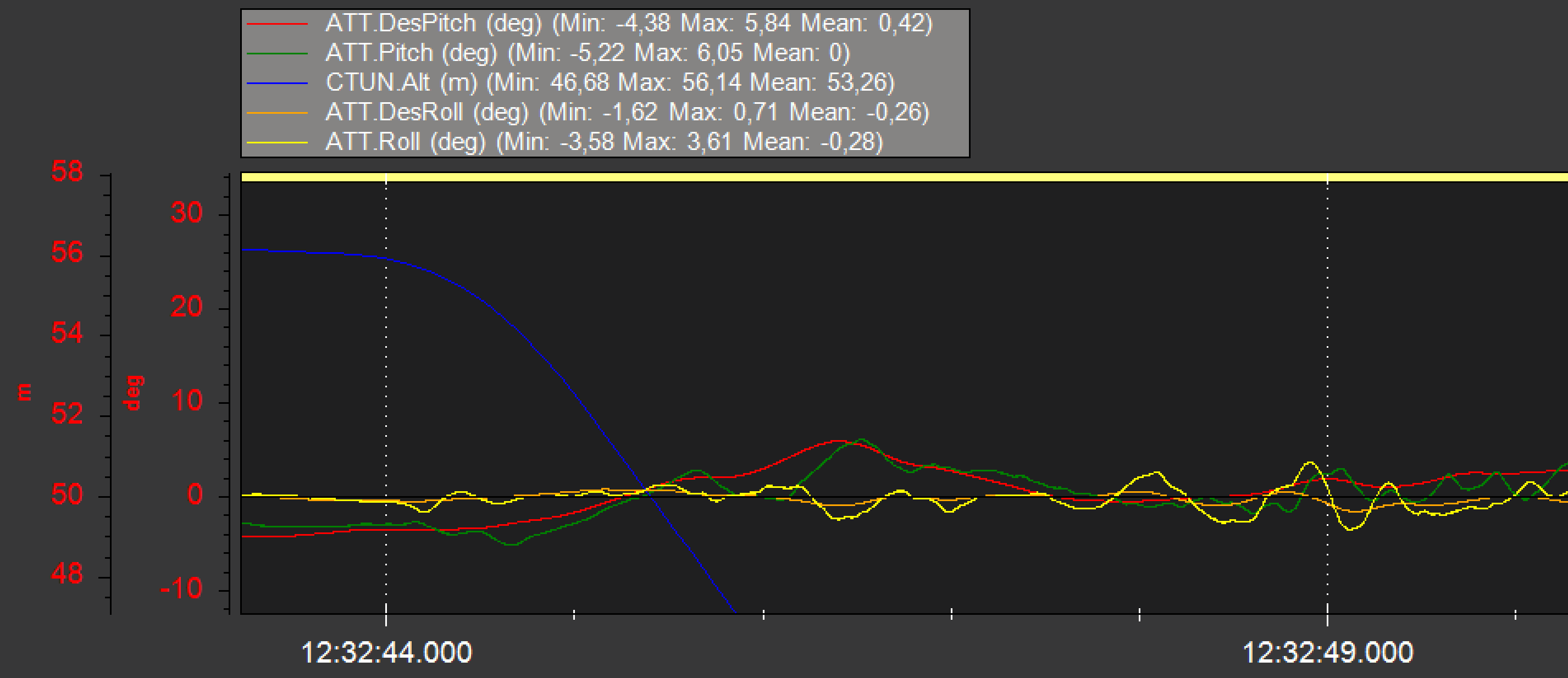
- I get well over 4 meters negative overshot when I abort an descent. How can I tune the altitude controller to perform better in that regard? Admittedly my descend speed is quite fast and I am sure to some degree this is normal, but I hope the current behavior can be improved. (ACCZ params are set according to hover thrust already)

Params:
https://1drv.ms/u/s!AuKkq6JXpbFT0sJ-2j3IPfSiX5UeVw?e=qA22E2
Log of dynamic flight with max angle runs, climbs/drops , flips, hover under moderate wind
https://1drv.ms/u/s!AuKkq6JXpbFT0sMCx0V29Hreru2qMw?e=gvuxFp