Hello, I’ve built a drone and used the ArduPilot board as the flight controller but there is a problem with the drone, when I tilt my drone forward, so that the pitch is negative, the quadchopter corrects the tilt incorrectlly, it corrects it to the other direction and thus makes the pitch angle increase instead of decreasing it, it corrects the pitch incorrectlly when I tilt it backwards as well.
The APM board seems to work fine in the other directions, and it corrects them well, exept from the pitch.
Does somebody know how to reverse the pitch axis from the APM board?
Thanks from advance.
I have already tried to reverse the pitch axis through the transmitter and it works good only when I’m controling it trought the transmitter but the drone still corrects incorrectlly, it still corrects to the other direction.
What do you mean “it works good controlling through the transmitter”. How else would you be controlling it?
But to answer your question the RC2_REVERSED parameter will reverse the pitch channel input. But again this is usually done on the transmitter to fix this problem.
I mean that after I’ve reversed the pitch axis through the transmitter, when I pushed the pitch stick down it indeed rotated down and the same for pitch up. But when I grabbed the drone, while it’s running and I tilted it forwards(negative pitch) the two forward motors stopped working and the back motors started working, which is not how it suppose to work.
By the way, I haven’t tried the RC2_REVERSED parameter yet, but I’ll try to activate it soon and I’ll let you know what happened.
I think that they’re connected correctly, I’ve connected each two far motors, in a diagonal line, in the same way and the other pair I’ve connected in the opposite way.
But how is it related to this that the drone is correcting the pitch in the opposite direction?
If you connected the front and back motors in the wrong order, it would compensate in the wrong direction. If you then have the pitch input in the wrong direction, too, it looks like the input is working correctly, while the stabilization is not. It happened to me before and I bet to others, too.
So, in case that I’ve connected the front and back motors incorrectly, do I need to change the direction of spin of the motors through the ESCs by replacing the negative and positive wires like @Helmet mentioned?
Or whether I need to connect the ESCs input cables to other JPI outputs on the APM board, or change the combination of them?
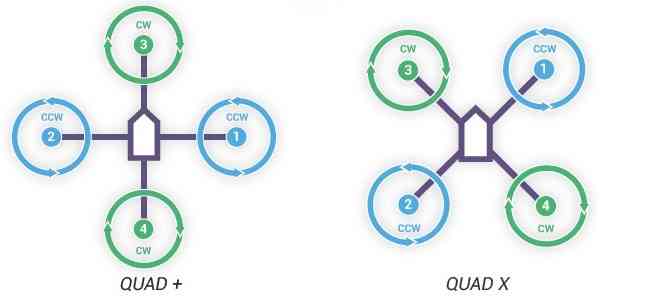
Just connect the motors like shown in the diagram. Output 1 goes to the right front motor/ESC turning counter clockwise and so on.
AND YOU NEVER CHANGE THE ESC INPUT POLARITY! It will destroy your ESC immediatly!!! Red is positive and black is negative, ALWAYS!!!
To change the direction the motor turns, you switch two of the three motor to ESC connections.
Yea I got confused… That’s what I meant, I changed the direction of spin by replacing the two outermost wires at the output of the ESC.
I will try to connect the motors that way and I’ll tell you if it worked out.
Edit: The problem has been solved, the drone is now correcting properly.
Thank you very much for your help.
Let me know how you fixed the issue. Reversing the channel output from transmitter is working, but I need to use the autopilot functions in mission planner.
It’s fixed the issue when iam using the transmitter. What about the automatic functions like RTL and mission planning. If the mission planner gives a message 'go forward ’ , will the drone go forward?
Hello,
I read in two different threads about setting the RC2_REVERSED to 1 in order to reverse the pitch of the drone. Since I am using a Radiomaster T8-Lite I don´t know how to reverse this channel from the transmitter, so I have set RC2_REVERSED to 1 in Arducopter. Please let me know if you think this would change any other begaviour of the drone besides just the pitch.
Thank you.
I wonder how that came about. I have been copying the same Transmitter default setup (where I swap it) for countless craft as long as I can remember with Pitch reversed.