I’m observing a very weird behavior here, maybe someone can explain.
If the throttle input stick is in the lower halve (so the interval from [RC3_MIN; RC_TRIM], my motors do not do anything (e.g. not spinning).
If the throttle stick is in the area from [RC3_TRIM; RC3_TRIM + RC3_MAX - RC3_TRIM / 2], throttle acts normally, that is, an increased value from RC3 results in an increased motor speed, with the motors running in the correct direction. Now, in the last interval from [RC3_TRIM + RC3_MAX - RC3_TRIM / 2; RC3_MAX], the motors spin in reversed direction, and they do so again proportional to the RC3 input (higher RC3 value results in motor spinning faster).
This is very weird, because for one, there is no deadband between normal and reversed thrust, and because full throttle forward comes right before slight throttle reversed.
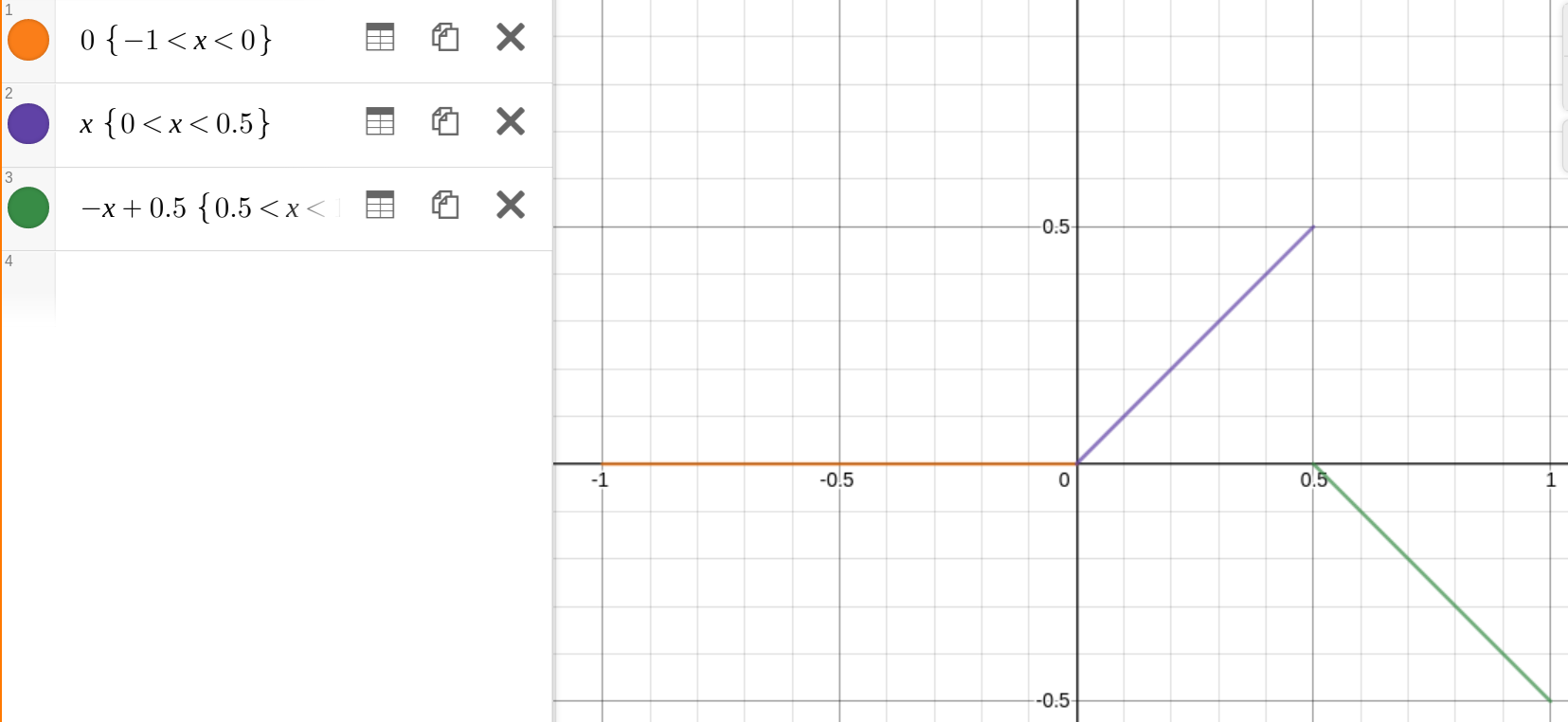
The following image represents how the throttle rc input (x axis) corresponds to my throttle output (y axis).
That sounds like an ESC issue to me. I can’t open your parameter file (that’s a problem on my end, not with your file) but based on your description, and the fact your ESC is running in both directions I think your ESC needs to be calibrated. Are you trying to setup reverse thrust?
Yes I’m trying to setup reverse thrust (sorry that I did not state this more clearly, thought it would be obvious by the title). My ESCs are connected via DShot, so I do not think this is a calibration issue, more likely a bug in Ardupilot (however, I’m told to ask in the forums first before polluting the issue tracker). Here are hopefully all relevant parameters:
Problem solved. I needed to mask the reversible motors in the SERVO_BLH_REMASK parameter. If only the DShot or Reverse Thrust page in the manual would have mentioned this parameter…