Hello, Ardupilot community!
I’m basically trying to test the capacity of the RTL mode during failsafe in case something happens to the drone in the actual application.
Basically, I just try to fly the drone (through manual control, mission planning, etc) and initiate a signal loss (turning off the controller, etc) to test the RTL capability. I have things needed to clarify upon observing my RTL tests.
-
Why does it that whenever the RTL is triggered, the altitude is not maintained? Like it’s supposed to raise itself based on the RTL altitude but while going back to the home waypoint, my drone sometimes goes down and then goes up again. I had a test though where it really did touch the ground and then it went up again.
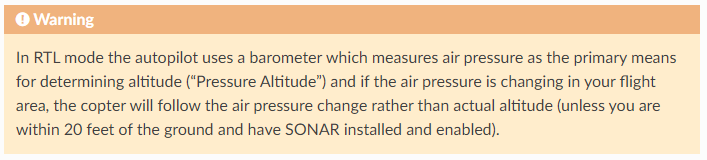
I’m a bit skeptical if the barometer was the reason behind it since of course it would technically rely on the barometer when it is not receiving any data anymore. (refer to the picture below)
-
There are also instances where it doesn’t perform the RTL altitude before going back home. It first goes home then once it reaches the home, it stops and then hovers up (like it’s performing the RTL alt) before it finally lands.
Because as far as I’ve observed in my tests, the RTL works perfectly fine when there is no signal loss or the RTL is triggered manually and not through failsafe. Thanks so much!