Just had an Autotune with success while landing the quad with success, suddenly the left motors raised output and the quad leaned to the right side. Luckily, didn’t loose any of my new props.
Strangely, X vibrations are bad but Y vibrations look OK. Usually they’re similar.
Z vibrations look OK. So look for something vibrating against the FC in one direction… Have you got a close up photo of the FC?
Motor outputs are not well balanced either. Center of gravity is a bit too far forward.
You might want to rerun Autotune on a day with less wind, the PIDs look good but a bit imbalanced for pitch vs roll - that could be because of the weight imbalance too.
Also check this:
BATT_FS_LOW_ACT,2 (or 3)
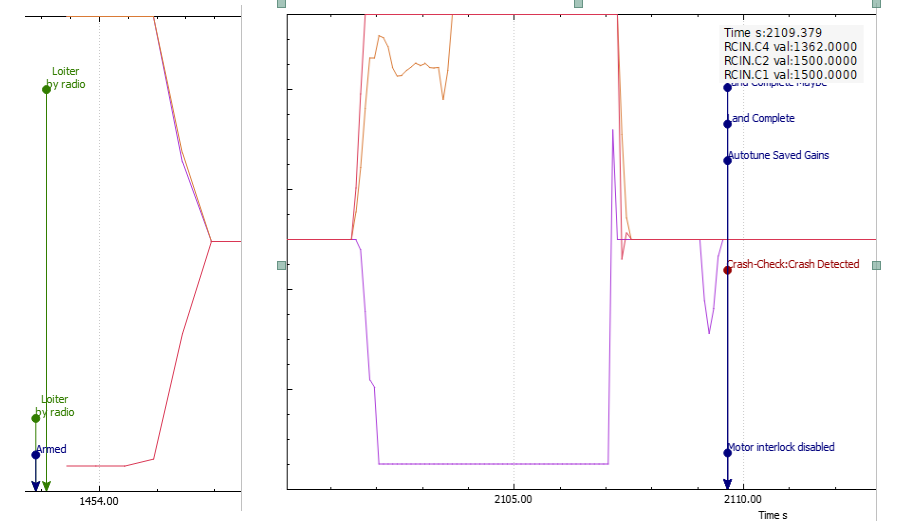
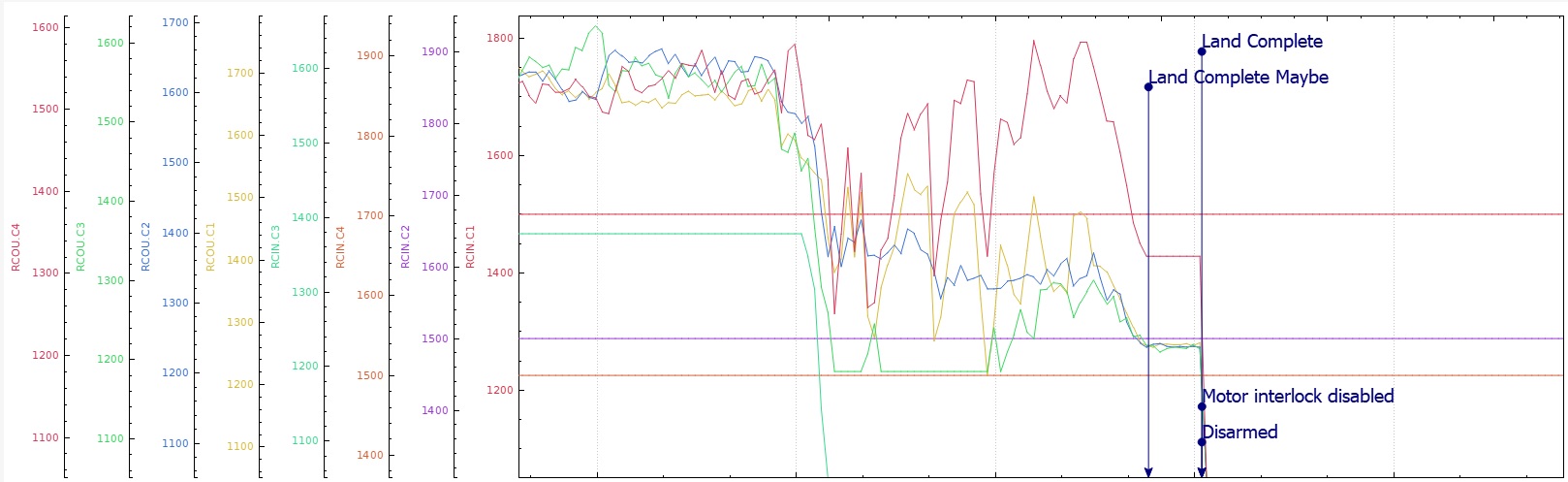
Disarm RC inputs dont look as clean as arming RC inputs, not sure if that’s got anything to do with it. My money is probably still on the vibrations, until someone else gives a better answer.
Disarm is throttle down and rudder full left. Not pitch forward and roll full right. During arming and disarming you should not touch pitch/roll.
Poor copter just did what you told it to do
The quad is abit more like a wide H, The X is 85cm and Y is 53cm, so I always get imbalanced PIDs and than copy from RLL to PIT.
I do not use failsafe on low bat since my crt bat has still enough juice to RTL (theoretically).
That is great idea which I never thought off, could have been very handy in my case.
So all in all, you believe my issue evolved from those vibrations? nothing related to range finder, altitude stuff? The reason I ask is that in all three flights it raised the rpm for the left motors and since my range finder is installed on the left side it might be related?
Before this Autotune I had a short test flight, log here
It ended up exactly as the one with the crash and almost tipped over to the right but than lowered rpm and disarmed. In that flight, though vibrations a bit high, but no clipping and its the same behavior as in the last flight. however in the last flight we got clipping so maybe it corroborates to your analysis.
gal
Hi Andras and thanks for looking into this, I truly believe I did the arm disarm sticks after it was lying on it side.
It landed and I was expecting that problem, the throttle was all the way down. You can see in a short test flight I did 5 minutes earlier the same behavior log file
So, when I opened the top plate I have found that the dual sided tape that was supposed to hold the FC to the mount was partly off and the FC was simply loose on the X axis.
This is true and that was how it was mounted until yesterday. Since I built the quad I suffered from vibes and clipping when flying faster the 50km/h or 1600cm/s
So now I try with dampened mount and see the results. If it works well I shall not argue that the cube must be hard mounted, but I can argue that every quad might need a different mounting for the fc
Gal